
How to control multiple Servo motors using one potentiometer with Arduino
How to control multiple Servo motors using one potentiometer with Arduino
Learn how to control multiple servo motors using one potentiometer with Arduino. Wiring shown, code is explained and at the end demonstrated. Code link is below the timing of chapters of video.
Multiple Servo one pot.: Main setup
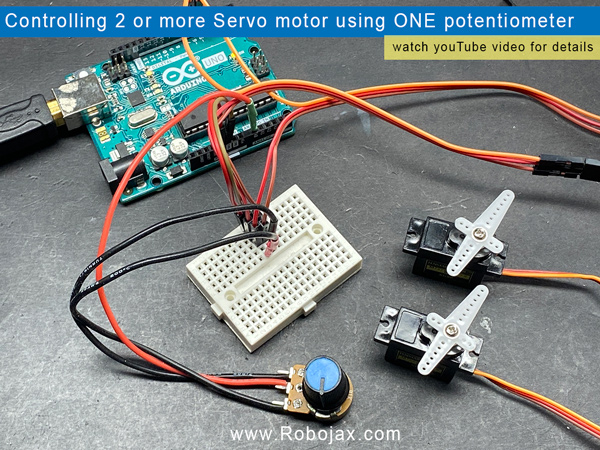
Click on image to enlarge
Multiple Servo one pot.: Main setup top view
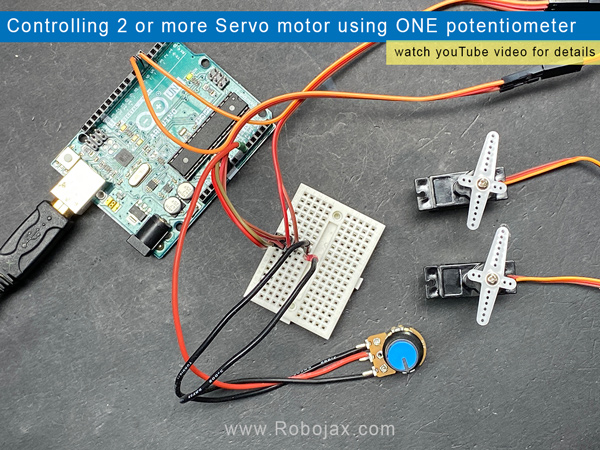
Click on image to enlarge
Multiple Servo one pot.: Creating extra 5V from Arduino on breadboard
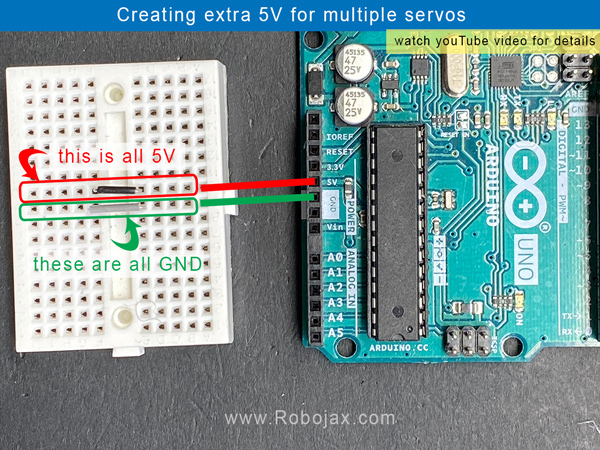
Click on image to enlarge
Affiliated Stores
SG90 Servo on Amazon USASG90 Servo auf Amazon Deutschland
SG90 Servo on Amazon Canada
SG90 Servo on Amazon UK
SG90 Servo on Amazon Italy
SG90 Servo on Amazon France
SG90 Servo on Amazon Spain
SG90 アマゾンジャパン
Related Resources to Servo Motor
- Controlling multiple servo with multiple potentiometers with Arduino
- Basic Servo control with Arduino
- Control Servo motor using your hand gesture
- Control Servo with Potentiometer
- Control Servo with Potentiometer and display on LCD
- Control Servo with 2 Push buttons
- Control 360 Servo
- Control Servo motor using any Infrared Remote with Arduino
- Control 360 Servo with 3 push buttons
- Control 16 Servo with Arduino
- Robojax Arduino Course on Udemy
- Get Early Access to my videos via Patreon
Code using ONE potentiometer to control as many servos as you want
/*
* Original code from File->Examples->Servo->Knob
*
* This is Arduino code to use ONE potentiometer (variable resistor) to control multiple servo motors
* Please watch video instruction https://youtu.be/QB49Rmc96Ho
* Updated from original code by
* Ahmad Shamshiri on Oct 27, 2020 at 23:01 in Ajax
* Ontario, Canada
* www.robojax.com
*
Controlling a servo position using a potentiometer (variable resistor)
by Michal Rinott <http://people.interaction-ivrea.it/m.rinott>
modified on 8 Nov 2013
by Scott Fitzgerald
http://www.arduino.cc/en/Tutorial/Knob
* Get this code and other Arduino codes from Robojax.com
Learn Arduino step by step in structured course with all material, wiring diagram and library
all in once place. Purchase My course on Udemy.com http://robojax.com/L/?id=62
If you found this tutorial helpful, please support me so I can continue creating
content like this. You can support me on Patreon http://robojax.com/L/?id=63
or make donation using PayPal http://robojax.com/L/?id=64
* * This code is "AS IS" without warranty or liability. Free to be used as long as you keep this note intact.*
* This code has been download from Robojax.com
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <https://www.gnu.org/licenses/>.
*/
#include <Servo.h>
Servo myservo1; // create servo 1 object to control a servo
Servo myservo2; // create servo 2 object to control a servo
//Servo myservo3 //create servo 3 object
int potpin = A0; // analog pin used to connect the potentiometer
unsigned int servoPin[]={5,6};//watch video for details https://youtu.be/QB49Rmc96Ho
int val; // variable to read the value from the analog pin
void setup() {
Serial.begin(9600);
Serial.println("Multiple Servo");
Serial.println("Robojax.com");
myservo1.attach(servoPin[0]); // attaches the servo 1 to the servo object
myservo2.attach(servoPin[1]); // attaches the servo 2 to the servo object
//add line for more servos watch video for details https://youtu.be/QB49Rmc96Ho
}
void loop() {
//watch video for details https://youtu.be/QB49Rmc96Ho
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 180); // scale it to use it with the servo (value between 0 and 180)
myservo1.write(val);
myservo2.write(val);
Serial.print(val);
Serial.println();
// sets the servo position according to the scaled value
delay(20); // waits for the servo to get there
//robojax.com code //watch video for details https://youtu.be/QB49Rmc96Ho
}