
Click to enlarge the image


32-bit fork of the MultiWii RC flight controller firmware. Things are moving... We flipped it and popped in an ATmega32u4—The Flip Pro—an Arduino Leonardo for everyone who wants to push the edge of what is possible. It is awesome to see what everyone has done.
For most people, the Flip 1.5 is the recommended choice, but we have to keep pushing on.
The Flip 1.5 will always be here at an unreal price—but let's see how far we can push the envelope with the Flip32. Please do not be scared, but it is not for beginners or non-technical flyers—if you want to fly with STM32, you kind of need to know what you are doing. Or Google a lot—tons of information are out there. I hope to get more people playing with the hardware. The software is still a bit experimental. All other settings need to be changed in the MultiWii 2.3 config. Please use the Chrome Baseflight Configurator for the GUI. Do not use the 2.2 GUI!
36x36 mm
5.3 grams (no headers, 7.3 grams with)
2000 degrees/second 3-axis MEMS gyro + accelerometer (MPU6050)
3-axis magnetometer (HMC5883L) (Flip32+ only)
Pressure sensor (MS5611) (Flip32+ only)
Flexible motor outputs, support various airframe types—
Quad/Hexa/Tri/Bi/Y4/Y6/Octo/Camera Gimbal. (Default is Quad-X)
Up to 8-ch RC input—supports standard receivers (PWM), PPM Sum receiver (FrSky, etc.), or Spektrum Satellite receiver.
Battery voltage monitoring
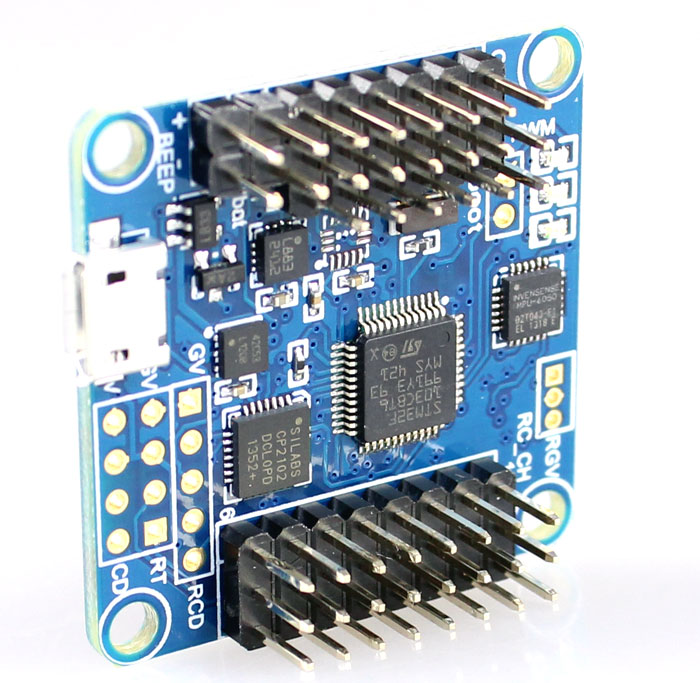
Modern 32-bit processor running at 3.3V/72MHz (STM32F103CB).
16Mbit onboard SPI flash
Onboard MicroUSB for setup and configuration
LEDs so bright, they will blind you
MultiWii-based configuration software for easy setup
rev v2.3 hardware
. please use the Chrome Baseflight Configurator for the GUI. DO not use the old 2.2 GUI!
STM32 - 32bits!
MPU6050 (Gryo/ACC)
HMC5883L - (Magnetometer) for Direction hold etc.
MS5611 - (Barometer) used for altitude hold and other features
Mixer Example settings:
#mixer tri → Tricopter
#mixer quadx → Quadrokopter in X configuration
#mixer hex6x → Hexacopter in X configuration
#feature ppm (activate PPM Receiver)
#feature-ppm (traditional receiver)
To change the channel order, here is an example:
#map EATR1234
EATR means:
-Elevator
-Aileron
-Throttle
-Rudder
-1234 are the channels
If you are finished, you have to save the settings; type :#saveSetup. Your radio should be 1000-2000 and midstick exactly 1500 (this all can be changed, of course, but this is easy to do). Go from the GUI in the CLI and do the following commands:
set mincheck = 1020
set maxcheck = 1980
set looptime =3000
set mincommand = 1000 <--as calibrated
set maxthrottle = 2000 <-- as calibrated
set minthrottle = 1100 (This is throttle after arming and, of course, this is different on every motor or ESC, so adjust to your preference).
Resources & references
No resources yet.
Files📁
No files available.










