Этот учебник является частью: ESP32-S3 RGB LED матрица
Замечательный проект для создания развлекательных и практических приложений с использованием модуля RGB-матрицы ESP32-S3. Ссылки на другие видеоролики находятся ниже этой статьи.

Проект матрицы RGB LED ESP32-S3 6 - Игра цель
Проект 6 - Игра с мишенью (Наклоните доску, чтобы поразить круг)
Проект 6 является финальным и самым интерактивным проектом в этой серии RGB LED матриц на ESP32-S3. Используя встроенный датчик движения QMI8658C, вы наклоняете плату, чтобы перемещать точку по матрице 8×8. В центре дисплея находится круглая "целевая зона". Когда ваша точка касается круга, цвет меняется и (по желанию) звучит звуковой сигнал. Это создает простую, но удивительно увлекательную игру на балансировку/координацию.
Все шесть проектов демонстрируются в одном видео на YouTube (встроенном на этой странице). Полный код игры загружается автоматически под этой статьей, а ссылки на покупку модуля через партнёрскую программу отображаются под разделом с кодом.

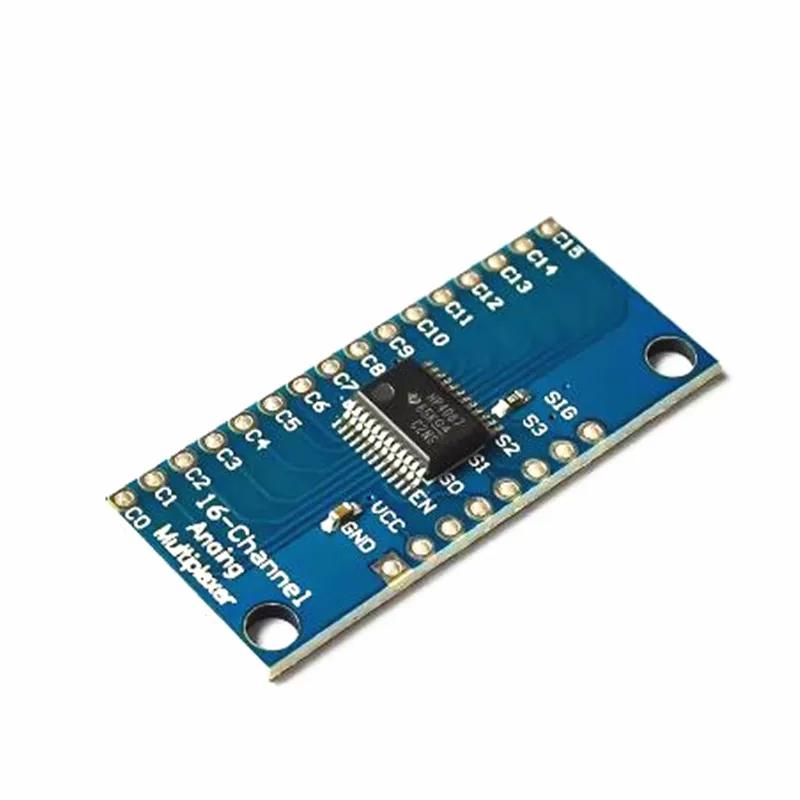
Обзор модуля RGB LED матрицы ESP32-S3
Этот модуль включает в себя:

- Микроконтроллер ESP32-S3(Wi-Fi + BLE)
- 8×8 RGB светодиодная матрица(64 адресуемых светодиодов)
- QMI8658C акселерометрдля определения наклона и ориентации
- USB-Cпорт для питания и программирования
- Загрузка / Сброскнопки
- ДоступноGPIO-выводыдля дополнений, таких как зуммеры или датчики
Для этой игры акселерометр является обязательным — он постоянно сообщает наклон по осям X/Y, позволяя точке плавно перемещаться в зависимости от угла наклона доски. В видео разделе этого проекта четко показано, как точка скользит и реагирует, когда вы наклоняете модуль влево/вправо/вперёд/назад.:contentReference[oaicite:0]{index=0}

Проекты, охваченные в видео (метки времени)
- 00:00- Введение
- 02:01- Установка плат ESP32
- 03:32- Установка библиотек
- 05:32- Проект 1: Движущаяся точка
- 11:11- Проект 2: Прокрутка текста
- 12:59- Проект 3: HTTP текст
- 16:41- Проект 4: Tilt Dot
- 18:55- Проект 5: Стрела вверх
- 20:02-Проект 6: Игра-цель (этот проект)
Этот фрагмент видео показывает как движение точки, так и логику обнаружения круга в действии, что облегчает понимание поведения координат.:contentReference[oaicite:1]{index=1}

Установка плат ESP32 в Arduino IDE
Если вы уже завершили предыдущие проекты, установка доски выполнена. В противном случае следуйте:
File > Preferences→ Добавьте URL-адрес платы ESP32.Tools > Board > Boards Manager…→ Установите "ESP32".- Выберите плату ESP32-S3 под
Tools > Board. - Выберите правильный COM-порт под
Tools > Port.
Установка необходимых библиотек
Эта игра использует:
Adafruit NeoMatrixAdafruit NeoPixelAdafruit GFXQMI8658(датчик движения)
Установите их через:
Sketch > Include Library > Manage Libraries…- Поиск:НеоМатрица→ Установить
- Установите зависимости (GFX+НеоПиксель)
- Поиск и установкаQMI8658
Как работает игра "Цель"
Акселерометр QMI8658C предоставляет значения наклона по осям X и Y. Эти значения соотносятся с координатами светодиодов (0-7 в обоих направлениях). Ваша точка перемещается по матрице в зависимости от угла наклона платы.
На экране рисуется круг (или кольцо) как "целевая зона." Вы выигрываете "попадание," когда точка накладывается на круг. В этот момент:
- Цвет цели меняется (случайным образом или предопределенно)
- Дополнительный зуммер издает звук (если подключен)
Поскольку матрица мала, круг рисуется с использованием простого радиусного проверки. Игра продолжается непрерывно, поэтому вы можете наклоняться вперед и назад, чтобы неоднократно попадать в круг.
Проект 6 - Настройки кода (Целевая игра)
Ниже приведены основные настройки, которые могут быть изменены пользователем и расположены вверху схемы. Полный код автоматически включен ниже этой статьи.
Настройка матрицы
// Matrix configuration
const int MATRIX_PIN = 14;
const int MATRIX_WIDTH = 8;
const int MATRIX_HEIGHT = 8;
Матрица RGB жестко подключена к GPIO 14 — не изменяйте это.
Яркость
uint8_t matrixBrightness = 40; // 0–255
Для использования в помещениях идеальны 30-60.
Цвет точки
// Dot color (R, G, B)
uint8_t dotRed = 255;
uint8_t dotGreen = 255;
uint8_t dotBlue = 255;
Это точка, которую вы перемещаете, наклоняя доску.
Цвет круга (Случайный или Фиксированный)
// Circle (target) color
uint8_t circleRed = 0;
uint8_t circleGreen = 0;
uint8_t circleBlue = 255;
// If true, choose a new random color each time the dot hits
bool randomCircleColor = true;
НаборrandomCircleColor = false;если вы хотите фиксированный цвет.
Радиус круга
// Target size (radius)
int targetRadius = 3; // 3 fits well on 8×8 matrix
Более крупные радиусы упрощают игру; меньшие делают её сложнее.
Чувствительность наклона
// Sensitivity of tilt mapping
float tiltScale = 4.0f; // increase = faster movement across screen
Если точка движется слишком быстро или скачет, уменьшите это число.
Настройки зуммера (по желанию)
// Buzzer pin (optional)
int buzzerPin = 6; // connect buzzer + to pin 6, – to GND
bool useBuzzer = true; // set false to disable sound
Если вы не подключите зуммер, просто установитеuseBuzzer = false;
Резюме
Проект 6 объединяет все, что было изучено в предыдущих проектах: рисование матриц, ввод с акселерометра, управление цветом, сглаживание движения и необязательный звук. Наклоняя плату, вы перемещаете точку, а удар по кругу изменяет его цвет и (по желанию) вызывает звуковой сигнал. Это веселая демонстрация сенсора движения на компактном RGB-дисплее.
Полный код "Игры с цельами" отображается автоматически под этой статьей. Вы также можете посмотреть часть видео о Проекте 6, чтобы увидеть, как движется точка и как обнаруживаются попадания. Если вы хотите создать свою собственную игру, партнерские ссылки для покупки модуля RGB LED Матрицы ESP32-S3 появляются под разделом кода.
Изображения


Этот учебник является частью: ESP32-S3 RGB LED матрица
- Проект матрицы RGB LED ESP32-S3 1 - Основной штрих
- Проект RGB LED матрицы ESP32-S3 2 - Прокручиваемый текст
- Проект RGB LED матрицы ESP32-S3 3 - Текст с мобильного телефона
- Проект RGB LED матрицы ESP32-S3 4 - Наклоненная точка
- Проект матрицы RGB LED на ESP32-S3 5 - Стрелка всегда вверх
- ESP32-S3 RGB LED матрица Wi-Fi + NTP проект часы - 1 базовые часы
- ESP32-S3 RGB светодиодная матрица Интернет-часы - 2-часовой многоцветный дисплей времени и даты
- Проект интернет-часов на матрице RGB LED ESP32-S3 - 3 ночных цвета с датой
- Проект интернет-часов на матрице RGB LED ESP32-S3 - 5 радуга цветов
- Проект интернет-часы с матрицей RGB LED на ESP32-S3 - 4 случайных цвета
- Тест матрицы RGB LED ESP32-S3 для настройки RGB, GRB
/*
Project 6: Tilt Circle Game – ESP32-S3 RGB LED Matrix (Waveshare)
This sketch reads tilt from the QMI8658C IMU and smoothly moves a dot
on the 8×8 RGB LED matrix based on board orientation.
▶️ Video Tutorial:
https://youtu.be/JKLuYrRcLMI
📚⬇️ Resources & Code Page:
https://robojax.com/RJT829
QMI8658_RGB_2
*/
#include <Arduino.h>
#include <math.h>
#include <Adafruit_GFX.h>
#include <Adafruit_NeoMatrix.h>
#include <Adafruit_NeoPixel.h>
#include <QMI8658.h> // by Lahav Gahali
// -------- LED MATRIX SETUP --------
#define MATRIX_PIN 14
#define MATRIX_WIDTH 8
#define MATRIX_HEIGHT 8
// Buzzer pin – change this to your actual buzzer GPIO.
const int BUZZER_PIN = 6; // TODO: set to your buzzer pin
// Matrix brightness (0–255)
const uint8_t MATRIX_BRIGHTNESS = 10;
Adafruit_NeoMatrix matrix = Adafruit_NeoMatrix(
MATRIX_WIDTH, MATRIX_HEIGHT, MATRIX_PIN,
NEO_MATRIX_TOP + NEO_MATRIX_LEFT +
NEO_MATRIX_ROWS + NEO_MATRIX_PROGRESSIVE,
NEO_GRB + NEO_KHZ800
);
// -------- IMU SETUP --------
QMI8658 imu;
// -------- GAME CONFIG --------
// How often the dot is allowed to move (ms).
// Bigger = slower movement.
const uint16_t MOVE_INTERVAL_MS = 150; // try 120–250
// How much tilt (m/s^2) before the dot moves.
// Increase if it feels too sensitive.
const float ACC_TILT_THRESHOLD = 2.0f; // about ~0.2 g
// Dot base color (RGB)
const uint8_t DOT_R = 255;
const uint8_t DOT_G = 255;
const uint8_t DOT_B = 255;
// Circle geometry (centered on 8x8)
const float CIRCLE_CENTER_X = (MATRIX_WIDTH - 1) / 2.0f; // 3.5
const float CIRCLE_CENTER_Y = (MATRIX_HEIGHT - 1) / 2.0f; // 3.5
const float CIRCLE_RADIUS = 3.0f;
const float CIRCLE_THICKNESS = 0.8f; // +- thickness around radius
// -------- GAME STATE --------
// Dot position on the 8x8 grid (0..7)
int dotX = 3;
int dotY = 3;
// Colors (16-bit NeoMatrix colors)
uint16_t dotColor;
uint16_t circleColor;
// To detect “just touched circle” vs “still on circle”
bool wasOnCircle = false;
// Timer for rate-limiting movement
unsigned long lastMoveTime = 0;
// -------- HELPER FUNCTIONS --------
// Classic NeoPixel color wheel (0-255 -> rainbow)
uint16_t wheel(byte pos) {
if (pos < 85) {
return matrix.Color(pos * 3, 255 - pos * 3, 0);
} else if (pos < 170) {
pos -= 85;
return matrix.Color(255 - pos * 3, 0, pos * 3);
} else {
pos -= 170;
return matrix.Color(0, pos * 3, 255 - pos * 3);
}
}
// Is a given pixel approximately on the circle?
bool isOnCircle(int x, int y) {
float dx = x - CIRCLE_CENTER_X;
float dy = y - CIRCLE_CENTER_Y;
float d2 = dx * dx + dy * dy;
float rMin = CIRCLE_RADIUS - CIRCLE_THICKNESS;
float rMax = CIRCLE_RADIUS + CIRCLE_THICKNESS;
return (d2 >= rMin * rMin) && (d2 <= rMax * rMax);
}
// Draw circle + dot
void drawScene() {
matrix.fillScreen(0);
// Draw circle
for (int y = 0; y < MATRIX_HEIGHT; y++) {
for (int x = 0; x < MATRIX_WIDTH; x++) {
if (isOnCircle(x, y)) {
matrix.drawPixel(x, y, circleColor);
}
}
}
// Draw dot (on top)
matrix.drawPixel(dotX, dotY, dotColor);
matrix.show();
}
// Simple blocking beep (short)
void buzzOnce() {
digitalWrite(BUZZER_PIN, HIGH);
delay(40);
digitalWrite(BUZZER_PIN, LOW);
}
// Use accelerometer to decide dot movement
void updateDotFromTilt(float ax, float ay) {
unsigned long now = millis();
if (now - lastMoveTime < MOVE_INTERVAL_MS) {
return; // too soon, wait
}
int dx = 0;
int dy = 0;
// On this board, Y tilt feels like "left/right" on the matrix,
// and X tilt feels like "up/down" → so we swap.
// --- Horizontal movement from AY (tilt left/right) ---
if (ay > ACC_TILT_THRESHOLD) {
dx = 1; // tilt to the right → move dot to the right
} else if (ay < -ACC_TILT_THRESHOLD) {
dx = -1; // tilt to the left → move dot to the left
}
// --- Vertical movement from AX (tilt forward/back) ---
// This was inverted. We flip the signs:
// ax > threshold = tilt "forward" (away) → move dot UP (dy = -1)
// ax < -threshold = tilt "back" (toward)→ move dot DOWN(dy = 1)
if (ax > ACC_TILT_THRESHOLD) {
dy = -1; // was +1 before
} else if (ax < -ACC_TILT_THRESHOLD) {
dy = 1; // was -1 before
}
if (dx != 0 || dy != 0) {
dotX = constrain(dotX + dx, 0, MATRIX_WIDTH - 1);
dotY = constrain(dotY + dy, 0, MATRIX_HEIGHT - 1);
lastMoveTime = now;
}
}
// -------- SETUP & LOOP --------
void setup() {
Serial.begin(115200);
delay(100);
// Matrix init
matrix.begin();
matrix.setBrightness(MATRIX_BRIGHTNESS);
matrix.fillScreen(0);
matrix.show();
// Buzzer init
pinMode(BUZZER_PIN, OUTPUT);
digitalWrite(BUZZER_PIN, LOW);
// IMU init
if (!imu.begin(11, 12)) {
Serial.println("Failed to initialize QMI8658!");
while (1) {
delay(100);
}
}
// Use m/s^2 and dps (optional, but nice)
imu.setAccelUnit_mps2(true);
imu.setGyroUnit_dps(true);
imu.setDisplayPrecision(3);
Serial.println("QMI8658 initialized.");
// Game initial state
randomSeed((uint32_t)micros());
dotX = MATRIX_WIDTH / 2;
dotY = MATRIX_HEIGHT / 2;
dotColor = matrix.Color(DOT_R, DOT_G, DOT_B);
circleColor = wheel(random(256));
drawScene();
}
void loop() {
// Read accelerometer
float ax, ay, az;
if (imu.readAccelMPS2(ax, ay, az)) {
// Debug if needed:
// Serial.print("AX: "); Serial.print(ax);
// Serial.print(" AY: "); Serial.print(ay);
// Serial.print(" AZ: "); Serial.println(az);
updateDotFromTilt(ax, ay);
}
// Check collision with circle
bool onCircle = isOnCircle(dotX, dotY);
if (onCircle && !wasOnCircle) {
// Just touched circle: change color + beep
circleColor = wheel(random(256));
buzzOnce();
}
wasOnCircle = onCircle;
// Redraw
drawScene();
// Small delay so we don’t hammer I2C too hard
delay(10);
}
Вещи, которые могут вам понадобиться
-
Амазонка
-
eBay
-
АлиЭкспрессКупить ESP32-S3 RGB-матрицу на AliExpresss.click.aliexpress.com
-
АлиЭкспрессПриобретите ESP32-S3 RGB Matrix на AliExpress (2)s.click.aliexpress.com
Ресурсы и ссылки
-
Внутренний🎨 Инструмент выбора цветаrobojax.com
Файлы📁
Файл Fritzing
-
esp32-S3-supermini-tht часть фритзинга
esp32-S3-supermini-tht.fzpz0.02 MB