Este tutorial faz parte de: Matriz de LEDs RGB ESP32-S3
Projeto bacana para criar com aplicações práticas e divertidas usando o módulo ESP32-S3 RGB Matrix. Links para outros vídeos estão abaixo deste artigo.

Projeto de Matriz de LED RGB ESP32-S3 6 - Jogo de Cible
Projeto 6 - Jogo de Alvo (Incline o Tabuleiro para Acertar o Círculo)
O Projeto 6 é o projeto final e mais interativo desta série de Matriz LED RGB ESP32-S3. Usando o sensor de movimento QMI8658C integrado, você inclina a placa para mover um ponto pela matriz 8×8. Uma "zona alvo" circular está situada no meio do display. Quando seu ponto toca o círculo, a cor muda e (opcionalmente) um zumbidor soa. Isso cria um jogo de equilíbrio/coordenção simples, mas surpreendentemente divertido.
Todos os seis projetos são demonstrados em um único vídeo do YouTube (incorporado nesta página). O código completo do jogo é carregado automaticamente abaixo deste artigo, e os links de compra afiliados para o módulo aparecem na seção de código.

Visão geral do Módulo de Matriz LED RGB ESP32-S3
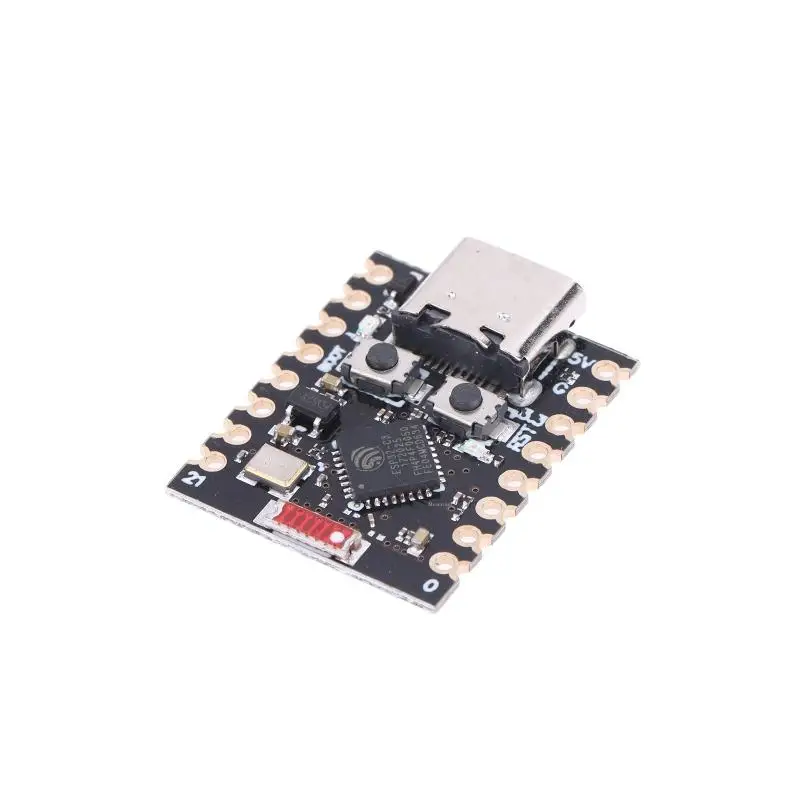
Este módulo inclui:

- microcontrolador ESP32-S3(Wi-Fi + BLE)
- Matriz LED RGB 8×8(64 LEDs endereçáveis)
- Acelerômetro QMI8658Cpara detecção de inclinação e orientação
- USB-Cporta para alimentação e programação
- Reiniciar / Resetarbotões
- DisponívelPinos GPIOpara complementos como campainhas ou sensores
Para este jogo, o acelerômetro é essencial - ele relata continuamente a inclinação X/Y, permitindo que o ponto se mova suavemente com base no ângulo do tabuleiro. A seção de vídeo deste projeto mostra claramente como o ponto desliza e reage conforme você inclina o módulo para a esquerda/direita/frente/trás.:contentReference[oaicite:0]{index=0}

Projetos Cobertos no Vídeo (Marcos de Tempo)
- 00:00- Introdução
- 02:01- Instalando placas ESP32
- 03:32- Instalando bibliotecas
- 05:32- Projeto 1: Ponto em Movimento
- 11:11- Projeto 2: Rolagem de Texto
- 12:59- Projeto 3: Texto HTTP
- 16:41- Projeto 4: Tilt Dot
- 18:55- Projeto 5: Seta para Cima
- 20:02-Projeto 6: Jogo de Alvo (este projeto)
Esta parte do vídeo mostra tanto o movimento do ponto quanto a lógica de detecção de círculos em ação, facilitando a compreensão de como as coordenadas se comportam.:contentReference[oaicite:1]{index=1}

Instalando placas ESP32 no Arduino IDE
Se você já completou os projetos anteriores, a instalação da placa está concluída. Caso contrário, siga:
File > Preferences→ Adicione a URL da placa ESP32.Tools > Board > Boards Manager…→ Instale "ESP32".- Selecione a placa ESP32-S3 em
Tools > Board. - Selecione a porta COM correta em
Tools > Port.
Instalando Bibliotecas Necessárias
Este jogo usa:
Adafruit NeoMatrixAdafruit NeoPixelAdafruit GFXQMI8658(sensor de movimento)
Instale-os através de:
Sketch > Include Library > Manage Libraries…- Pesquisar:NeoMatrix→ Instalar
- Instale as dependências (GFX+NeoPixel)
- Pesquisar e instalarQMI8658
Como o Jogo da MIRA Funciona
O acelerômetro QMI8658C fornece valores de inclinação X e Y. Esses valores são mapeados para coordenadas LED (0-7 em ambas as direções). Seu ponto se move pela matriz com base no ângulo da placa.
Um círculo (ou anel) é desenhado na tela como a "área alvo." Você ganha um "acerto" sempre que o ponto se sobrepõe ao círculo. Nesse momento:
- A cor-alvo muda (aleatória ou predefinida)
- Um buzzer opcional emite um beep (se conectado)
Como a matriz é pequena, o círculo é desenhado usando uma verificação simples de raio. O jogo roda continuamente, então você pode inclinar para frente e para trás para acertar o círculo repetidamente.
Projeto 6 - Configurações de Código (Jogo Alvo)
Abaixo estão as principais configurações ajustáveis pelo usuário localizadas na parte superior do esboço. O código completo está automaticamente incluído abaixo deste artigo.
Configuração da Matriz
// Matrix configuration
const int MATRIX_PIN = 14;
const int MATRIX_WIDTH = 8;
const int MATRIX_HEIGHT = 8;
A matriz RGB está conectada diretamente ao GPIO 14 - não altere isso.
Brilho
uint8_t matrixBrightness = 40; // 0–255
Para uso interno, 30-60 é ideal.
Cor do ponto
// Dot color (R, G, B)
uint8_t dotRed = 255;
uint8_t dotGreen = 255;
uint8_t dotBlue = 255;
Este é o ponto que você move inclinando o tabuleiro.
Cor da Círculo (Aleatória ou Fixa)
// Circle (target) color
uint8_t circleRed = 0;
uint8_t circleGreen = 0;
uint8_t circleBlue = 255;
// If true, choose a new random color each time the dot hits
bool randomCircleColor = true;
ConjuntorandomCircleColor = false;se você quiser uma cor fixa.
Raio do Círculo
// Target size (radius)
int targetRadius = 3; // 3 fits well on 8×8 matrix
Raízes maiores tornam o jogo mais fácil; raízes menores tornam-no mais difícil.
Sensibilidade de Inclinação
// Sensitivity of tilt mapping
float tiltScale = 4.0f; // increase = faster movement across screen
Se o ponto se mover muito rápido ou saltar, reduza esse número.
Configurações do Buzzer (Opcional)
// Buzzer pin (optional)
int buzzerPin = 6; // connect buzzer + to pin 6, – to GND
bool useBuzzer = true; // set false to disable sound
Se você não conectar um buzzer, basta definiruseBuzzer = false;
Resumo
O Projeto 6 combina tudo que foi aprendido em projetos anteriores: desenho de matriz, entrada de acelerômetro, controle de cor, suavização de movimento e som opcional. Inclinar a placa move o ponto, e atingir o círculo muda sua cor e (opcionalmente) aciona um bip. É uma demonstração divertida de detecção de movimento em um display RGB compacto.
O código completo do "Target Game" é exibido automaticamente abaixo deste artigo. Você também pode assistir à parte do Projeto 6 do vídeo para ver como o ponto se move e como os acertos são detectados. Se você quiser construir seu próprio jogo, links de afiliados para comprar o módulo de matriz LED RGB ESP32-S3 aparecem na seção do código.
Imagens


Este tutorial é parte de: Matriz de LEDs RGB ESP32-S3
- Projetos de Matriz de LED RGB ESP32-S3 (Jogo de Inclinação, Texto, Seta, Demonstração WiFi)
- Projeto de Matriz de LED RGB ESP32-S3 2 - Texto Rolante
- Projeto de Matriz LED RGB ESP32-S3 3 - Texto do telefone móvel
- Projeto de Matriz LED RGB ESP32-S3 4 - Ponto Inclinado
- Projeto de Matriz de LED RGB ESP32-S3 5 - Setas sempre para cima
- Projeto de Relógio Básico ESP32-S3 Matriz de LED RGB Wi-Fi + Relógio NTP -1
- Projeto de Relógio da Internet com Matriz de LED RGB ESP32-S3 - Exibição de Hora e Data em Multi Cor para 2 Relógios
- Projeto de Relógio da Internet com Matriz de LED RGB ESP32-S3 - 3 Cores Noturnas com Data
- Projeto de Relógio Internet com Matriz LED RGB ESP32-S3 - 5 Cores do Arco-íris
- Projeto de Relógio de Internet com Matriz de LED RGB ESP32-S3 - 4 Cores Aleatórias
- Teste de Matriz de LED RGB ESP32-S3 para configuração RGB, GRB
/*
Project 6: Tilt Circle Game – ESP32-S3 RGB LED Matrix (Waveshare)
This sketch reads tilt from the QMI8658C IMU and smoothly moves a dot
on the 8×8 RGB LED matrix based on board orientation.
▶️ Video Tutorial:
https://youtu.be/JKLuYrRcLMI
📚⬇️ Resources & Code Page:
https://robojax.com/RJT829
QMI8658_RGB_2
*/
#include <Arduino.h>
#include <math.h>
#include <Adafruit_GFX.h>
#include <Adafruit_NeoMatrix.h>
#include <Adafruit_NeoPixel.h>
#include <QMI8658.h> // by Lahav Gahali
// -------- LED MATRIX SETUP --------
#define MATRIX_PIN 14
#define MATRIX_WIDTH 8
#define MATRIX_HEIGHT 8
// Buzzer pin – change this to your actual buzzer GPIO.
const int BUZZER_PIN = 6; // TODO: set to your buzzer pin
// Matrix brightness (0–255)
const uint8_t MATRIX_BRIGHTNESS = 10;
Adafruit_NeoMatrix matrix = Adafruit_NeoMatrix(
MATRIX_WIDTH, MATRIX_HEIGHT, MATRIX_PIN,
NEO_MATRIX_TOP + NEO_MATRIX_LEFT +
NEO_MATRIX_ROWS + NEO_MATRIX_PROGRESSIVE,
NEO_GRB + NEO_KHZ800
);
// -------- IMU SETUP --------
QMI8658 imu;
// -------- GAME CONFIG --------
// How often the dot is allowed to move (ms).
// Bigger = slower movement.
const uint16_t MOVE_INTERVAL_MS = 150; // try 120–250
// How much tilt (m/s^2) before the dot moves.
// Increase if it feels too sensitive.
const float ACC_TILT_THRESHOLD = 2.0f; // about ~0.2 g
// Dot base color (RGB)
const uint8_t DOT_R = 255;
const uint8_t DOT_G = 255;
const uint8_t DOT_B = 255;
// Circle geometry (centered on 8x8)
const float CIRCLE_CENTER_X = (MATRIX_WIDTH - 1) / 2.0f; // 3.5
const float CIRCLE_CENTER_Y = (MATRIX_HEIGHT - 1) / 2.0f; // 3.5
const float CIRCLE_RADIUS = 3.0f;
const float CIRCLE_THICKNESS = 0.8f; // +- thickness around radius
// -------- GAME STATE --------
// Dot position on the 8x8 grid (0..7)
int dotX = 3;
int dotY = 3;
// Colors (16-bit NeoMatrix colors)
uint16_t dotColor;
uint16_t circleColor;
// To detect “just touched circle” vs “still on circle”
bool wasOnCircle = false;
// Timer for rate-limiting movement
unsigned long lastMoveTime = 0;
// -------- HELPER FUNCTIONS --------
// Classic NeoPixel color wheel (0-255 -> rainbow)
uint16_t wheel(byte pos) {
if (pos < 85) {
return matrix.Color(pos * 3, 255 - pos * 3, 0);
} else if (pos < 170) {
pos -= 85;
return matrix.Color(255 - pos * 3, 0, pos * 3);
} else {
pos -= 170;
return matrix.Color(0, pos * 3, 255 - pos * 3);
}
}
// Is a given pixel approximately on the circle?
bool isOnCircle(int x, int y) {
float dx = x - CIRCLE_CENTER_X;
float dy = y - CIRCLE_CENTER_Y;
float d2 = dx * dx + dy * dy;
float rMin = CIRCLE_RADIUS - CIRCLE_THICKNESS;
float rMax = CIRCLE_RADIUS + CIRCLE_THICKNESS;
return (d2 >= rMin * rMin) && (d2 <= rMax * rMax);
}
// Draw circle + dot
void drawScene() {
matrix.fillScreen(0);
// Draw circle
for (int y = 0; y < MATRIX_HEIGHT; y++) {
for (int x = 0; x < MATRIX_WIDTH; x++) {
if (isOnCircle(x, y)) {
matrix.drawPixel(x, y, circleColor);
}
}
}
// Draw dot (on top)
matrix.drawPixel(dotX, dotY, dotColor);
matrix.show();
}
// Simple blocking beep (short)
void buzzOnce() {
digitalWrite(BUZZER_PIN, HIGH);
delay(40);
digitalWrite(BUZZER_PIN, LOW);
}
// Use accelerometer to decide dot movement
void updateDotFromTilt(float ax, float ay) {
unsigned long now = millis();
if (now - lastMoveTime < MOVE_INTERVAL_MS) {
return; // too soon, wait
}
int dx = 0;
int dy = 0;
// On this board, Y tilt feels like "left/right" on the matrix,
// and X tilt feels like "up/down" → so we swap.
// --- Horizontal movement from AY (tilt left/right) ---
if (ay > ACC_TILT_THRESHOLD) {
dx = 1; // tilt to the right → move dot to the right
} else if (ay < -ACC_TILT_THRESHOLD) {
dx = -1; // tilt to the left → move dot to the left
}
// --- Vertical movement from AX (tilt forward/back) ---
// This was inverted. We flip the signs:
// ax > threshold = tilt "forward" (away) → move dot UP (dy = -1)
// ax < -threshold = tilt "back" (toward)→ move dot DOWN(dy = 1)
if (ax > ACC_TILT_THRESHOLD) {
dy = -1; // was +1 before
} else if (ax < -ACC_TILT_THRESHOLD) {
dy = 1; // was -1 before
}
if (dx != 0 || dy != 0) {
dotX = constrain(dotX + dx, 0, MATRIX_WIDTH - 1);
dotY = constrain(dotY + dy, 0, MATRIX_HEIGHT - 1);
lastMoveTime = now;
}
}
// -------- SETUP & LOOP --------
void setup() {
Serial.begin(115200);
delay(100);
// Matrix init
matrix.begin();
matrix.setBrightness(MATRIX_BRIGHTNESS);
matrix.fillScreen(0);
matrix.show();
// Buzzer init
pinMode(BUZZER_PIN, OUTPUT);
digitalWrite(BUZZER_PIN, LOW);
// IMU init
if (!imu.begin(11, 12)) {
Serial.println("Failed to initialize QMI8658!");
while (1) {
delay(100);
}
}
// Use m/s^2 and dps (optional, but nice)
imu.setAccelUnit_mps2(true);
imu.setGyroUnit_dps(true);
imu.setDisplayPrecision(3);
Serial.println("QMI8658 initialized.");
// Game initial state
randomSeed((uint32_t)micros());
dotX = MATRIX_WIDTH / 2;
dotY = MATRIX_HEIGHT / 2;
dotColor = matrix.Color(DOT_R, DOT_G, DOT_B);
circleColor = wheel(random(256));
drawScene();
}
void loop() {
// Read accelerometer
float ax, ay, az;
if (imu.readAccelMPS2(ax, ay, az)) {
// Debug if needed:
// Serial.print("AX: "); Serial.print(ax);
// Serial.print(" AY: "); Serial.print(ay);
// Serial.print(" AZ: "); Serial.println(az);
updateDotFromTilt(ax, ay);
}
// Check collision with circle
bool onCircle = isOnCircle(dotX, dotY);
if (onCircle && !wasOnCircle) {
// Just touched circle: change color + beep
circleColor = wheel(random(256));
buzzOnce();
}
wasOnCircle = onCircle;
// Redraw
drawScene();
// Small delay so we don’t hammer I2C too hard
delay(10);
}
Coisas que você pode precisar
-
Amazonas
-
eBay
-
AliExpressCompre a matriz RGB ESP32-S3 na AliExpress (2)s.click.aliexpress.com
-
AliExpressCompre a matriz RGB ESP32-S3 na AliExpress.s.click.aliexpress.com
Recursos e referências
-
InternoFerramenta de seleção de coresrobojax.com
Arquivos📁
Arquivo Fritzing
-
esp32-S3-supermini-tht peça fritzing
esp32-S3-supermini-tht.fzpz0.02 MB