Questo tutorial è parte di: Tutorial WiFi LoRa 32
Tutti i video relativi a Heltec WiFi LoRa 32 sono correlati tramite questo gruppo. I link ad altri video si trovano sotto questo articolo.
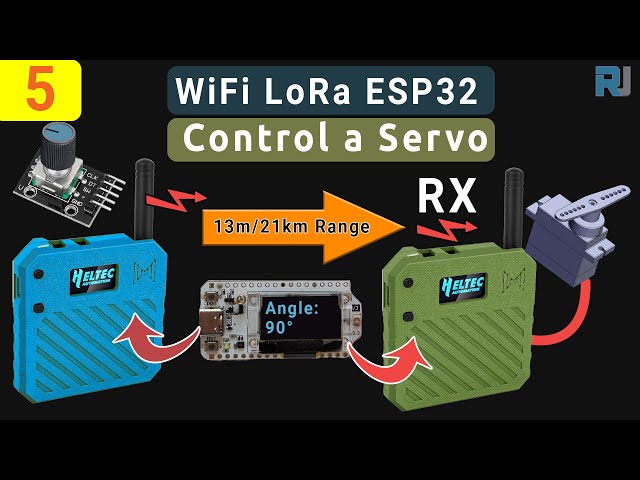
Controlla un servomotore da lontano! Tutorial Arduino Heltec WiFi LoRa 32 V3 (TX)
In questa guida, prenderemo i disegni esatti dal nostro progetto servo Heltec ESP32 LoRa V3 e spiegheremo come funzionano: nessun codice extra aggiunto. Imparerai come il trasmettitore legge un encoder rotativo, acquisisce e invia quell'angolo tramite LoRa, e come il ricevitore lo decripta e aziona un micro-servo. Tutti i link ai componenti e al codice sono qui sotto, e se ordini tramite i nostri link affiliati ci aiuti a continuare a realizzare questi tutorial.
Installazione delle schede Heltec ESP32
Aggiungi questo percorso nelle preferenze del tuo Arduino IDE come mostrato nel video:https://resource.heltec.cn/download/package_heltec_esp32_index.json
1. Hardware e configurazione del trasmettitore (TX)
Dalla parte TX hai bisogno di:
-
Scheda Heltec WiFi LoRa 32 V3 (in custodia Meshnology N33, alimentata da batteria da 3000 mAh)
-
Encoder rotativo cablato a GPIO 6 (CLK), GPIO 5 (DT), GPIO 4 (SW)
-
Display OLED su I²C (SDA= 4, SCL= 15)
Lo schizzo inizia includendo e inizializzando tutto esattamente come inHeltec_ESP32_LoRa_V3_Sevo_TX_AiRotaryEncoder.ino:
cppCopyEdit#include "AiEsp32RotaryEncoder.h"
#include "HT_SSD1306Wire.h"
#include "LoRaWan_APP.h"
#include "mbedtls/aes.h"
// …
static SSD1306Wire display(0x3c, 500000, SDA_OLED, SCL_OLED, GEOMETRY, RST_OLED);
AiEsp32RotaryEncoder rotaryEncoder = AiEsp32RotaryEncoder(
PIN_A, PIN_B, SW_PIN, ROTARY_ENCODER_VCC_PIN, false, true, true);
const int homePosition = 90;
const int MAX_ANGLE = 180;
int servoAngel = homePosition;
Insetup(), il codice:
-
Accende sul display, imposta il carattere
-
Chiamate
rotaryEncoder.begin(),rotaryEncoder.setup(readEncoderISR),rotaryEncoder.setBoundaries(0, MAX_ANGLE, true)erotaryEncoder.setAcceleration(20) -
Ripristina l'encoder a
homePosition -
Inizializza LoRa tramite
Mcu.begin(HELTEC_BOARD, SLOW_CLK_TPYE)e impostaRadioEvents, canale e parametri esattamente come nello schizzo fornito.
2. Inviare l'angolo in modo sicuro
Ogni ciclo di loop viene eseguitorotary_loop(), che:
-
Legge l'encoder nell'ISR
-
Quando
servoAngelcambia, lo impacchetta in un buffer da 16 byte, crittografa con AES-128 (encryptAES()dallo schizzo), e chiamacppCopyEditRadio.Send(data, sizeof(data)); -
Setè
lora_idle = falsefino aOnTxDone()accende e ripristina.
3. Ricevitore (RX) hardware e configurazione
Dalla parte RX hai bisogno di:
-
Scheda Heltec WiFi LoRa 32 V3 (stesso case/batteria)
-
Micro-servo (ad es. SG90) su GPIO 6 (o qualsiasi pin PWM testato)
-
display OLED
Il bozzetto inHeltec_ESP32_LoRa_V3_Sevo_RX.inoiniziato con:
cppCopyEdit#include <ESP32Servo.h>
#include "HT_SSD1306Wire.h"
#include "LoRaWan_APP.h"
#include "mbedtls/aes.h"
// …
const int servoPin = 6;
const int SERVO_DUTY_MIN = 400; // us
const int SERVO_DUTY_MAX = 2400; // us
Servo myservo;
int servoAngel = homePosition;
Insetup(), it:
-
Alimentazione su Vext per il modulo display/LoRa
VextON()) -
Chiamate
Radio.Init(&RadioEvents)e configura RX con gli stessi parametri LoRa -
Attacca il servocomando con
myservo.attach(servoPin, SERVO_DUTY_MIN, SERVO_DUTY_MAX)e lo centra ahomePosition.
4. Ricezione, decrittazione e pilotaggio del servo
Il nucleo è ilOnRxDone(uint8_t *payload, …)callback:
cppCopyEditdecryptAES((uint8_t*)rxpacket, userKey);
if (isNumber(rxpacket)) {
servoAngel = atoi(rxpacket);
myservo.write(servoAngel);
delay(15);
}
Serial.println("Angle: " + String(servoAngel));
lora_idle = true;
Decripta il blocco di 16 byte, lo converte in un intero e aggiorna immediatamente il servo.
5. Supporto del pin PWM e taratura del servo
Abbiamo testato questi pin ESP32 per l'uscita PWM e funzionano tutti per pilotare un micro-servomotore:
CopyEdit1, 2, 3, 4, 5, 6, 19, 35, 36, 38, 39, 40, 41, 42, 45, 47, 48
Per uno standard SG90, il nostro codice utilizza un intervallo di impulsi di400 µs(0Ã'°) to2400 µs(180°), che offre un'ampia curva fluida senza jitter.
6. Schema elettrico
Di seguito ci sono segnaposto in cui puoi inserire i tuoi schemi TX e RX:


Codice e link affiliati
Tutti gli schizzi sopra menzionati sono disponibili per il download nella sezione "Codice e Risorse" qui sotto. Se desideri costruirlo da solo, ti preghiamo di considerare di acquistare il tuo modulo Heltec LoRa32 V3, la custodia Meshnology N33, l'encoder rotativo e il servo SG90 tramite i nostri link affiliati. Non ti costerà nulla in più e ci aiuta a continuare a realizzare tutorial gratuiti come questo!
Capitoli video per riferimento
-
00:00 Introduzione e Panoramica
-
00:05 Concetti di Controllo Remoto
-
00:19 Nozioni di base sulla comunicazione LoRa
-
00:23 Anteprima hardware
-
00:28 Vetrina di Custodie e Batterie
-
01:03 Caratteristiche del Modulo
-
01:42 Specifiche e Connettività
-
02:54 Alimentazione del servomotore
-
03:05 Cablaggio e Pinout
-
09:35 Posizionamento dell'antenna
-
11:04 Assemblaggio del caso
-
29:26 Caricamenti Schizzi
-
35:09 Test di Gamma 1,2 km
-
36:38 Test di intervallo 1,4 km
-
38:41 Riepilogo delle prestazioni
-
43:04 Conclusione e Supporto
Questo tutorial è parte di: Tutorial WiFi LoRa 32
- Utilizzando Heltec WiFi LoRa 32 V3 per trasmettere la temperatura utilizzando DHT22 fino a 1.4km
- 13 miglia 20 km senza WiFi? Come LoRa ha inviato tensione attraverso distanze incredibili! (Heltec WiFi LoRa 32 V3)
- Accendi un dispositivo da 13 miglia (21 km) di distanza - Il progetto definitivo off-grid LoRa con WiFi LoRa 32!
- Sistema di allerta porta remota da 21 km (13 miglia) di distanza con LoRa - Fuori rete! (Heltec WiFi LoRa 32 V3)
- Progetto di Relay Remoto Fai-da-te: Modulo Heltec LoRa 32 senza Wi-Fi/senza SIM a 21 km
- How to Use the Heltec LoRa CubeCell Development Board HTCC-AB01
/*
File: Heltec_ESP32_LoRa_V3_Sevo_TX_AiRotaryEncoder.ino
written on 24 Jun, 2025 by Ahmad Shamshiri
* =====================================================================
* ARDUINO CODE DESCRIPTION: SECURE LoRa SERVO CONTROL SYSTEM (TX)
* =====================================================================
*
* HARDWARE COMPONENTS:
* -------------------
* - Main Controller: Heltec WiFi LoRa 32 V3
* - Enclosure: Meshnology N33 case with 3000mAh battery
* - Input: Rotary encoder with push-button
* - Feedback: Built-in OLED display
* - Output: Servo motor + LoRa wireless transmission
*
* SYSTEM FUNCTIONALITY:
* -------------------
* [1] ROTARY ENCODER CONTROL:
* - Clockwise/Counter-clockwise rotation adjusts target angle (0°-180°)
* - Real-time angle display on OLED screen
* - Push-button returns servo to Home position (default: 90°)
*
* [2] SECURE WIRELESS TRANSMISSION:
* - All angle values encrypted before LoRa transmission
* - Home position command transmitted as special secure packet
* - Uses 433MHz LoRa band for reliable communication
*
* [3] POWER MANAGEMENT:
* - Optimized for battery operation (3000mAh)
* - Low-power modes between transmissions
*
* FOR COMPLETE SETUP INSTRUCTIONS:
* Please watch the tutorial video at: https://youtu.be/EPynuJ7sasY
* =====================================================================
Watch full video explaination: https://youtu.be/EPynuJ7sasY
Resources page: https://robojax.com/T635
* DISCLAIMER:
* This code is provided "AS IS" without warranty of any kind. The author
* shall not be held liable for any damages arising from the use of this code.
*
* LICENSE:
* This work is licensed under the GNU General Public License v3.0
* Permissions beyond the scope of this license may be available at Robojax.com
*
* SHARING TERMS:
* You are free to share, copy and modify this code for non-commercial purposes
* PROVIDED you:
* 1. Keep this entire comment block intact with the original code
* 2. Include the original Robojax.com link
* 3. Keep the YouTube tutorial link (if applicable)
* 4. Clearly indicate any modifications made
*
* Original tutorial at: https://robojax.com/T635
* YouTube Video: https://youtu.be/EPynuJ7sasY
*
* ********************************************************************
*/
#include <Wire.h>
#include "HT_SSD1306Wire.h"
#include "WiFi.h"
static SSD1306Wire display(0x3c, 500000, SDA_OLED, SCL_OLED, GEOMETRY_128_64, RST_OLED); // addr , freq , i2c group , resolution , rst
const int TX_POWER = 2;//dBm from 2 to 20. when powered via battery 2 to 14dBm is the best option
const int MAX_ANGLE = 180;//the most common is 180, but you can set it as needed
String labelAngle = "Angle";
const int homePosition = 90; //initial position
//endcoder
const int SW_PIN = 4;//define a pin for rotary encode switch
const int PIN_A = 6;
const int PIN_B = 5;//
const int ANGLE_STEP = 6;//
const bool debug= false;//to print debug data in serial moinitor set it to true, else false
int servoAngel = homePosition;
int oldAngleValue = servoAngel;
#include "mbedtls/aes.h"//for securing data
#include <cstring> // For memset, memcpy
mbedtls_aes_context aes;
const char *userKey = "hyhT676#h~_1a"; //Security key.
#include "LoRaWan_APP.h"
#include "AiEsp32RotaryEncoder.h"
#include "Arduino.h"
#define ROTARY_ENCODER_VCC_PIN -1
//instead of changing here, rather change numbers above
AiEsp32RotaryEncoder rotaryEncoder = AiEsp32RotaryEncoder(
PIN_A,
PIN_B,
SW_PIN,
ROTARY_ENCODER_VCC_PIN,
ANGLE_STEP);
#define RF_FREQUENCY 915432000 // Hz
#define TX_OUTPUT_POWER TX_POWER // dBm from 2 to 20. when powered via battery 2 to 14dBm
#define LORA_BANDWIDTH 0 // [0: 125 kHz,
// 1: 250 kHz,
// 2: 500 kHz,
// 3: Reserved]
#define LORA_SPREADING_FACTOR 7 // [SF7..SF12]
#define LORA_CODINGRATE 1 // [1: 4/5,
// 2: 4/6,
// 3: 4/7,
// 4: 4/8]
#define LORA_PREAMBLE_LENGTH 8 // Same for Tx and Rx
#define LORA_SYMBOL_TIMEOUT 0 // Symbols
#define LORA_FIX_LENGTH_PAYLOAD_ON false
#define LORA_IQ_INVERSION_ON false
#define RX_TIMEOUT_VALUE 1000
#define BUFFER_SIZE 64 // Define the payload size here
char txpacket[BUFFER_SIZE];
char rxpacket[BUFFER_SIZE];
double txNumber;
bool lora_idle=true;
static RadioEvents_t RadioEvents;
unsigned long lastTxTime = 0;
void OnTxDone( void );
void OnTxTimeout( void );
void decryptAES(uint8_t *data, const char *key);
void encryptAES(uint8_t *data, const char *key);
void processKey(const char *userKey, uint8_t *processedKey, size_t keySize);
void VextON(void);
void rotary_loop();//prototyp function: rotary encoder
void IRAM_ATTR readEncoderISR();//prototyp function: rotary encoder
void rotary_onButtonClick();//prototyp function: rotary encoder
void setup() {
Serial.begin(115200);
Serial.println();
VextON();
delay(100);
//we must initialize rotary encoder
rotaryEncoder.begin();
rotaryEncoder.setup(readEncoderISR);
bool circleValues = false;
rotaryEncoder.setBoundaries(0, MAX_ANGLE, circleValues); //minValue, maxValue, circleValues true|false (when max go to min and vice versa)
/*Rotary acceleration introduced 25.2.2021.
* in case range to select is huge, for example - select a value between 0 and 1000 and we want 785
* without accelerateion you need long time to get to that number
* Using acceleration, faster you turn, faster will the value raise.
* For fine tuning slow down.
*/
//rotaryEncoder.disableAcceleration(); //acceleration is now enabled by default - disable if you dont need it
rotaryEncoder.setAcceleration(20); //or set the value - larger number = more accelearation; 0 or 1 means disabled acceleration
rotaryEncoder.reset(homePosition); //set home position
// Initialising the UI will init the display too.
display.init();
display.setFont(ArialMT_Plain_10);
//LoRa stuff
Mcu.begin(HELTEC_BOARD,SLOW_CLK_TPYE);
txNumber=0;
RadioEvents.TxDone = OnTxDone;
RadioEvents.TxTimeout = OnTxTimeout;
Radio.Init( &RadioEvents );
Radio.SetChannel( RF_FREQUENCY );
Radio.SetTxConfig( MODEM_LORA, TX_OUTPUT_POWER, 0, LORA_BANDWIDTH,
LORA_SPREADING_FACTOR, LORA_CODINGRATE,
LORA_PREAMBLE_LENGTH, LORA_FIX_LENGTH_PAYLOAD_ON,
true, 0, 0, LORA_IQ_INVERSION_ON, 3000 );
}
void displayAngle() {
display.clear(); // Clear display before new content
// Line 1: Text: Angle
display.setTextAlignment(TEXT_ALIGN_LEFT);
// Line 2: Temperature value in 24pt font
display.setFont(ArialMT_Plain_24);
// Format
String angleString = String(servoAngel) + "°"; //
display.setFont(ArialMT_Plain_16);
display.drawString(0, 0, labelAngle);
display.setFont(ArialMT_Plain_24);
display.drawString(0, 15, angleString);
display.display(); // Update OLED
}
void VextON(void)
{
pinMode(Vext,OUTPUT);
digitalWrite(Vext, LOW);
}
void VextOFF(void) //Vext default OFF
{
pinMode(Vext,OUTPUT);
digitalWrite(Vext, HIGH);
}
void sendData()
{
String txData = String(servoAngel) ;
uint8_t data[BUFFER_SIZE];
memset(data, 0, sizeof(data)); // Zero-padding
strncpy((char*)data, txData.c_str(), sizeof(data) - 1); // Copy string safely
encryptAES(data, userKey); // Encrypt before sending
if(lora_idle == true)
{
//delay(1000);
Radio.Send(data, sizeof(data));
if(debug){
Serial.print("Sending: ");
Serial.println((char *)data);
}
lora_idle = false;
oldAngleValue =servoAngel;//keep record of angle change
}
Radio.IrqProcess( );
}
void loop() {
rotary_loop();
// clear the display
display.clear();
displayAngle(); //
if(oldAngleValue != servoAngel)
{
sendData();
}
//delay(100);
}
void OnTxDone( void )
{
if(debug){
Serial.println("TX done......");
}
lora_idle = true;
}
void OnTxTimeout( void )
{
Radio.Sleep( );
if(debug){
Serial.println("TX Timeout......");
}
lora_idle = true;
}
/**
* Converts a user-provided plaintext key into a fixed-length 16-byte (128-bit)
* or 32-byte (256-bit) key.
*/
void processKey(const char *userKey, uint8_t *processedKey, size_t keySize) {
memset(processedKey, 0, keySize); // Fill with zeros
size_t len = strlen(userKey);
if (len > keySize) len = keySize; // Truncate if too long
memcpy(processedKey, userKey, len); // Copy valid key part
}
/**
* Encrypts a 16-byte (one block) message using AES-128.
*/
void encryptAES(uint8_t *data, const char *key) {
uint8_t processedKey[16]; // 128-bit key
processKey(key, processedKey, 16);
mbedtls_aes_init(&aes);
mbedtls_aes_setkey_enc(&aes, processedKey, 128);
mbedtls_aes_crypt_ecb(&aes, MBEDTLS_AES_ENCRYPT, data, data);
mbedtls_aes_free(&aes);
}
/**
* Decrypts a 16-byte (one block) message using AES-128.
*/
void decryptAES(uint8_t *data, const char *key) {
uint8_t processedKey[16]; // 128-bit key
processKey(key, processedKey, 16);
mbedtls_aes_init(&aes);
mbedtls_aes_setkey_dec(&aes, processedKey, 128);
mbedtls_aes_crypt_ecb(&aes, MBEDTLS_AES_DECRYPT, data, data);
mbedtls_aes_free(&aes);
}
void rotary_onButtonClick()
{
static unsigned long lastTimePressed = 0;
//ignore multiple press in that time milliseconds
if (millis() - lastTimePressed < 500)
{
return;
}
lastTimePressed = millis();
if(debug){
Serial.print("button pressed ");
Serial.print(millis());
Serial.println(" milliseconds after restart");
}
}
void rotary_loop()
{
//dont print anything unless value changed
if (rotaryEncoder.encoderChanged())
{
if(debug){
Serial.print("Value: ");
Serial.println(rotaryEncoder.readEncoder());
}
servoAngel = rotaryEncoder.readEncoder();
}
if (rotaryEncoder.isEncoderButtonClicked())
{
rotaryEncoder.reset(homePosition);
servoAngel = homePosition;
rotary_onButtonClick();
}
}
void IRAM_ATTR readEncoderISR()
{
rotaryEncoder.readEncoder_ISR();
}
Common Course Links
Common Course Files
Risorse e riferimenti
-
EsternoCollegamento al sito web Heltec WiFi Kit 32heltec.org
File📁
Nessun file disponibile.