Ce tutoriel fait partie de: Tutoriels WiFi LoRa 32
Toutes les vidéos relatives au routeur Heltec WiFi LoRa 32 sont regroupées ici. Vous trouverez des liens vers d'autres vidéos ci-dessous.
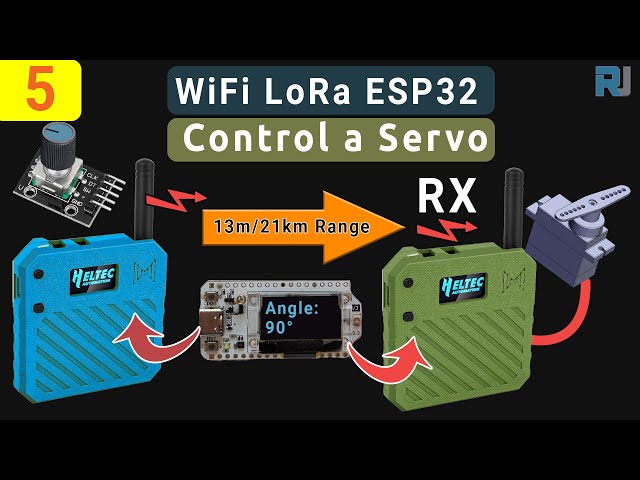
Contrôlez un moteur servo à des kilomètres de distance ! Tutoriel Arduino Heltec WiFi LoRa 32 V3 (TX)
Dans ce guide, nous prenons les croquis exacts de notre projet de servo Heltec ESP32 LoRa V3 et expliquons comment ils fonctionnent - sans code supplémentaire ajouté. Vous apprendrez comment l'émetteur lit un encodeur rotatif, sécurise et envoie cet angle via LoRa, et comment le récepteur le déchiffre et actionne un micro-servo. Tous les liens vers les pièces et le code sont ci-dessous, et si vous commandez via nos liens d'affiliés, cela nous aide à continuer à réaliser ces tutoriels.
Installation des cartes Heltec ESP32
Ajoutez ce chemin dans les préférences de votre IDE Arduino comme montré dans la vidéo :https://resource.heltec.cn/download/package_heltec_esp32_index.json
1. Matériel et configuration de l'émetteur (TX)
Sur le côté TX, vous avez besoin de :
-
Carte Heltec WiFi LoRa 32 V3 (dans le boîtier Meshnology N33, alimentée par une batterie de 3000 mAh)
-
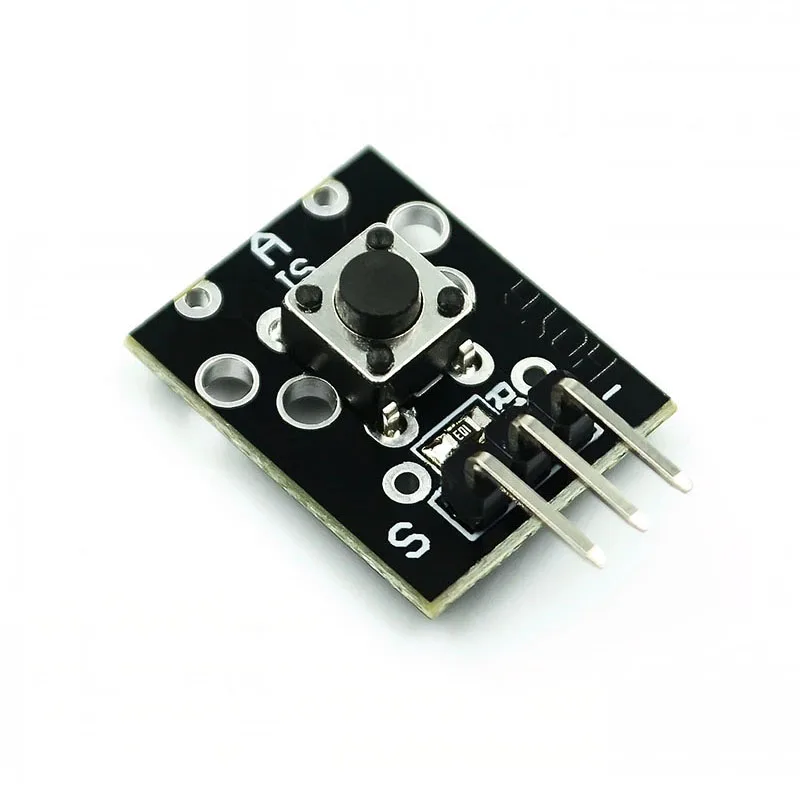
Encodeur rotatif câblé à GPIO 6 (CLK), GPIO 5 (DT), GPIO 4 (SW)
-
Écran OLED sur I²C (SDA= 4, SCL= 15)
Le croquis commence par inclure et initialiser tout exactement comme dansHeltec_ESP32_LoRa_V3_Sevo_TX_AiRotaryEncoder.ino:
cppCopyEdit#include "AiEsp32RotaryEncoder.h"
#include "HT_SSD1306Wire.h"
#include "LoRaWan_APP.h"
#include "mbedtls/aes.h"
// …
static SSD1306Wire display(0x3c, 500000, SDA_OLED, SCL_OLED, GEOMETRY, RST_OLED);
AiEsp32RotaryEncoder rotaryEncoder = AiEsp32RotaryEncoder(
PIN_A, PIN_B, SW_PIN, ROTARY_ENCODER_VCC_PIN, false, true, true);
const int homePosition = 90;
const int MAX_ANGLE = 180;
int servoAngel = homePosition;
Danssetup(), le code :
-
Alimente l'affichage, définit la police
-
Appels
rotaryEncoder.begin(),rotaryEncoder.setup(readEncoderISR),rotaryEncoder.setBoundaries(0, MAX_ANGLE, true)etrotaryEncoder.setAcceleration(20) -
Réinitialise l'encodeur à
homePosition -
Initialise LoRa via
Mcu.begin(HELTEC_BOARD, SLOW_CLK_TPYE)et met en placeRadioEvents, canal, et paramètres exactement comme dans le croquis fourni.
2. Envoyer l'angle en toute sécurité
Chaque cycle de boucle s'exécuterotary_loop(), ce qui :
-
Lit l'encodeur dans l'ISR
-
Quand
servoAngelmodifie, l'emballe dans un tampon de 16 octets, le chiffre avec AES-128 (encryptAES()de l'esquisse), et appellecppCopyEditRadio.Send(data, sizeof(data)); -
Ensembles
lora_idle = falsejusqu'àOnTxDone()il déclenche et réinitialise.
3. Matériel et configuration du récepteur (RX)
D'un côté RX, vous avez besoin de :
-
Carte Heltec WiFi LoRa 32 V3 (même boîtier/batterie)
-
Micro-servomoteur (par exemple SG90) sur GPIO 6 (ou toute broche PWM testée)
-
écran OLED
Le croquis dansHeltec_ESP32_LoRa_V3_Sevo_RX.inocommence par :
cppCopyEdit#include <ESP32Servo.h>
#include "HT_SSD1306Wire.h"
#include "LoRaWan_APP.h"
#include "mbedtls/aes.h"
// …
const int servoPin = 6;
const int SERVO_DUTY_MIN = 400; // us
const int SERVO_DUTY_MAX = 2400; // us
Servo myservo;
int servoAngel = homePosition;
Danssetup(), it:
-
Alimente le Vext pour le module d'affichage/LoRa.
VextON()) -
Appels
Radio.Init(&RadioEvents)et configure RX avec les mêmes paramètres LoRa -
Attache le servo avec
myservo.attach(servoPin, SERVO_DUTY_MIN, SERVO_DUTY_MAX)et le centre àhomePosition.
4. Réception, décryptage et commande du servo
Le cœur est leOnRxDone(uint8_t *payload, …)callback:
cppCopyEditdecryptAES((uint8_t*)rxpacket, userKey);
if (isNumber(rxpacket)) {
servoAngel = atoi(rxpacket);
myservo.write(servoAngel);
delay(15);
}
Serial.println("Angle: " + String(servoAngel));
lora_idle = true;
Il déchiffre le bloc de 16 octets, le convertit en entier et met immédiatement à jour le servo.
5. Support de broches PWM et réglage de servo
Nous avons testé ces broches ESP32 pour la sortie PWM et elles fonctionnent toutes pour piloter un micro-servo :
CopyEdit1, 2, 3, 4, 5, 6, 19, 35, 36, 38, 39, 40, 41, 42, 45, 47, 48
Pour un SG90 standard, notre code utilise une plage d'impulsions de400 µs(0Ã'°) to2400 µs(180°), ce qui procure un mouvement fluide et complet sans à-coups.
6. Schéma de câblage
Ci-dessous, vous trouverez des espaces réservés où vous pouvez insérer vos schémas TX et RX :


Code et liens d'affiliation
Tous les croquis ci-dessus sont disponibles en téléchargement dans la section "Code & Ressources" ci-dessous. Si vous souhaitez le construire vous-même, veuillez envisager d'acheter votre module Heltec LoRa32 V3, le boîtier Meshnology N33, l'encodeur rotatif et le servomoteur SG90 via nos liens d'affiliation. Cela ne vous coûte rien de plus et nous aide à continuer de produire des tutoriels gratuits comme celui-ci !
Chapitres vidéo pour référence
-
00:00 Introduction et Aperçu
-
00:05 Concepts de télécommande
-
00:19 Notions de base sur la communication LoRa
-
00:23 Aperçu du matériel
-
00:28 Vitrine de coques et de batteries
-
01:03 Caractéristiques du module
-
01:42 Spécifications et connectivité
-
02:54 Alimentation du Servo
-
03:05 Câblage et brochage
-
09:35 Placement de l'antenne
-
11:04 Assemblage de cas
-
29:26 Téléchargement de croquis
-
35:09 Test de portée 1,2 km
-
36:38 Test de portée 1,4 km
-
38:41 Récapitulatif de la performance
-
43:04 Conclusion et soutien
Ce tutoriel fait partie de: Tutoriels WiFi LoRa 32
- Utilisation du Heltec WiFi LoRa 32 V3 pour transmettre la température avec un DHT22 sur 1,4 km.
- 13 miles 20 km sans WiFi ? Comment LoRa a envoyé des tensions à travers des distances incroyables ! (Heltec WiFi LoRa 32 V3)
- Allumez un appareil à 21 km (13 miles) de distance - Le projet LoRa hors réseau ultime avec WiFi LoRa 32 !
- Système d'alerte de porte à distance à 21 km (13 miles) avec LoRa - Hors réseau ! (Heltec WiFi LoRa 32 V3)
- Projet de relais à distance DIY : module Heltec LoRa 32 sans Wi-Fi/sans SIM sur 13 miles
- How to Use the Heltec LoRa CubeCell Development Board HTCC-AB01
/*
File: Heltec_ESP32_LoRa_V3_Sevo_TX_AiRotaryEncoder.ino
written on 24 Jun, 2025 by Ahmad Shamshiri
* =====================================================================
* ARDUINO CODE DESCRIPTION: SECURE LoRa SERVO CONTROL SYSTEM (TX)
* =====================================================================
*
* HARDWARE COMPONENTS:
* -------------------
* - Main Controller: Heltec WiFi LoRa 32 V3
* - Enclosure: Meshnology N33 case with 3000mAh battery
* - Input: Rotary encoder with push-button
* - Feedback: Built-in OLED display
* - Output: Servo motor + LoRa wireless transmission
*
* SYSTEM FUNCTIONALITY:
* -------------------
* [1] ROTARY ENCODER CONTROL:
* - Clockwise/Counter-clockwise rotation adjusts target angle (0°-180°)
* - Real-time angle display on OLED screen
* - Push-button returns servo to Home position (default: 90°)
*
* [2] SECURE WIRELESS TRANSMISSION:
* - All angle values encrypted before LoRa transmission
* - Home position command transmitted as special secure packet
* - Uses 433MHz LoRa band for reliable communication
*
* [3] POWER MANAGEMENT:
* - Optimized for battery operation (3000mAh)
* - Low-power modes between transmissions
*
* FOR COMPLETE SETUP INSTRUCTIONS:
* Please watch the tutorial video at: https://youtu.be/EPynuJ7sasY
* =====================================================================
Watch full video explaination: https://youtu.be/EPynuJ7sasY
Resources page: https://robojax.com/T635
* DISCLAIMER:
* This code is provided "AS IS" without warranty of any kind. The author
* shall not be held liable for any damages arising from the use of this code.
*
* LICENSE:
* This work is licensed under the GNU General Public License v3.0
* Permissions beyond the scope of this license may be available at Robojax.com
*
* SHARING TERMS:
* You are free to share, copy and modify this code for non-commercial purposes
* PROVIDED you:
* 1. Keep this entire comment block intact with the original code
* 2. Include the original Robojax.com link
* 3. Keep the YouTube tutorial link (if applicable)
* 4. Clearly indicate any modifications made
*
* Original tutorial at: https://robojax.com/T635
* YouTube Video: https://youtu.be/EPynuJ7sasY
*
* ********************************************************************
*/
#include <Wire.h>
#include "HT_SSD1306Wire.h"
#include "WiFi.h"
static SSD1306Wire display(0x3c, 500000, SDA_OLED, SCL_OLED, GEOMETRY_128_64, RST_OLED); // addr , freq , i2c group , resolution , rst
const int TX_POWER = 2;//dBm from 2 to 20. when powered via battery 2 to 14dBm is the best option
const int MAX_ANGLE = 180;//the most common is 180, but you can set it as needed
String labelAngle = "Angle";
const int homePosition = 90; //initial position
//endcoder
const int SW_PIN = 4;//define a pin for rotary encode switch
const int PIN_A = 6;
const int PIN_B = 5;//
const int ANGLE_STEP = 6;//
const bool debug= false;//to print debug data in serial moinitor set it to true, else false
int servoAngel = homePosition;
int oldAngleValue = servoAngel;
#include "mbedtls/aes.h"//for securing data
#include <cstring> // For memset, memcpy
mbedtls_aes_context aes;
const char *userKey = "hyhT676#h~_1a"; //Security key.
#include "LoRaWan_APP.h"
#include "AiEsp32RotaryEncoder.h"
#include "Arduino.h"
#define ROTARY_ENCODER_VCC_PIN -1
//instead of changing here, rather change numbers above
AiEsp32RotaryEncoder rotaryEncoder = AiEsp32RotaryEncoder(
PIN_A,
PIN_B,
SW_PIN,
ROTARY_ENCODER_VCC_PIN,
ANGLE_STEP);
#define RF_FREQUENCY 915432000 // Hz
#define TX_OUTPUT_POWER TX_POWER // dBm from 2 to 20. when powered via battery 2 to 14dBm
#define LORA_BANDWIDTH 0 // [0: 125 kHz,
// 1: 250 kHz,
// 2: 500 kHz,
// 3: Reserved]
#define LORA_SPREADING_FACTOR 7 // [SF7..SF12]
#define LORA_CODINGRATE 1 // [1: 4/5,
// 2: 4/6,
// 3: 4/7,
// 4: 4/8]
#define LORA_PREAMBLE_LENGTH 8 // Same for Tx and Rx
#define LORA_SYMBOL_TIMEOUT 0 // Symbols
#define LORA_FIX_LENGTH_PAYLOAD_ON false
#define LORA_IQ_INVERSION_ON false
#define RX_TIMEOUT_VALUE 1000
#define BUFFER_SIZE 64 // Define the payload size here
char txpacket[BUFFER_SIZE];
char rxpacket[BUFFER_SIZE];
double txNumber;
bool lora_idle=true;
static RadioEvents_t RadioEvents;
unsigned long lastTxTime = 0;
void OnTxDone( void );
void OnTxTimeout( void );
void decryptAES(uint8_t *data, const char *key);
void encryptAES(uint8_t *data, const char *key);
void processKey(const char *userKey, uint8_t *processedKey, size_t keySize);
void VextON(void);
void rotary_loop();//prototyp function: rotary encoder
void IRAM_ATTR readEncoderISR();//prototyp function: rotary encoder
void rotary_onButtonClick();//prototyp function: rotary encoder
void setup() {
Serial.begin(115200);
Serial.println();
VextON();
delay(100);
//we must initialize rotary encoder
rotaryEncoder.begin();
rotaryEncoder.setup(readEncoderISR);
bool circleValues = false;
rotaryEncoder.setBoundaries(0, MAX_ANGLE, circleValues); //minValue, maxValue, circleValues true|false (when max go to min and vice versa)
/*Rotary acceleration introduced 25.2.2021.
* in case range to select is huge, for example - select a value between 0 and 1000 and we want 785
* without accelerateion you need long time to get to that number
* Using acceleration, faster you turn, faster will the value raise.
* For fine tuning slow down.
*/
//rotaryEncoder.disableAcceleration(); //acceleration is now enabled by default - disable if you dont need it
rotaryEncoder.setAcceleration(20); //or set the value - larger number = more accelearation; 0 or 1 means disabled acceleration
rotaryEncoder.reset(homePosition); //set home position
// Initialising the UI will init the display too.
display.init();
display.setFont(ArialMT_Plain_10);
//LoRa stuff
Mcu.begin(HELTEC_BOARD,SLOW_CLK_TPYE);
txNumber=0;
RadioEvents.TxDone = OnTxDone;
RadioEvents.TxTimeout = OnTxTimeout;
Radio.Init( &RadioEvents );
Radio.SetChannel( RF_FREQUENCY );
Radio.SetTxConfig( MODEM_LORA, TX_OUTPUT_POWER, 0, LORA_BANDWIDTH,
LORA_SPREADING_FACTOR, LORA_CODINGRATE,
LORA_PREAMBLE_LENGTH, LORA_FIX_LENGTH_PAYLOAD_ON,
true, 0, 0, LORA_IQ_INVERSION_ON, 3000 );
}
void displayAngle() {
display.clear(); // Clear display before new content
// Line 1: Text: Angle
display.setTextAlignment(TEXT_ALIGN_LEFT);
// Line 2: Temperature value in 24pt font
display.setFont(ArialMT_Plain_24);
// Format
String angleString = String(servoAngel) + "°"; //
display.setFont(ArialMT_Plain_16);
display.drawString(0, 0, labelAngle);
display.setFont(ArialMT_Plain_24);
display.drawString(0, 15, angleString);
display.display(); // Update OLED
}
void VextON(void)
{
pinMode(Vext,OUTPUT);
digitalWrite(Vext, LOW);
}
void VextOFF(void) //Vext default OFF
{
pinMode(Vext,OUTPUT);
digitalWrite(Vext, HIGH);
}
void sendData()
{
String txData = String(servoAngel) ;
uint8_t data[BUFFER_SIZE];
memset(data, 0, sizeof(data)); // Zero-padding
strncpy((char*)data, txData.c_str(), sizeof(data) - 1); // Copy string safely
encryptAES(data, userKey); // Encrypt before sending
if(lora_idle == true)
{
//delay(1000);
Radio.Send(data, sizeof(data));
if(debug){
Serial.print("Sending: ");
Serial.println((char *)data);
}
lora_idle = false;
oldAngleValue =servoAngel;//keep record of angle change
}
Radio.IrqProcess( );
}
void loop() {
rotary_loop();
// clear the display
display.clear();
displayAngle(); //
if(oldAngleValue != servoAngel)
{
sendData();
}
//delay(100);
}
void OnTxDone( void )
{
if(debug){
Serial.println("TX done......");
}
lora_idle = true;
}
void OnTxTimeout( void )
{
Radio.Sleep( );
if(debug){
Serial.println("TX Timeout......");
}
lora_idle = true;
}
/**
* Converts a user-provided plaintext key into a fixed-length 16-byte (128-bit)
* or 32-byte (256-bit) key.
*/
void processKey(const char *userKey, uint8_t *processedKey, size_t keySize) {
memset(processedKey, 0, keySize); // Fill with zeros
size_t len = strlen(userKey);
if (len > keySize) len = keySize; // Truncate if too long
memcpy(processedKey, userKey, len); // Copy valid key part
}
/**
* Encrypts a 16-byte (one block) message using AES-128.
*/
void encryptAES(uint8_t *data, const char *key) {
uint8_t processedKey[16]; // 128-bit key
processKey(key, processedKey, 16);
mbedtls_aes_init(&aes);
mbedtls_aes_setkey_enc(&aes, processedKey, 128);
mbedtls_aes_crypt_ecb(&aes, MBEDTLS_AES_ENCRYPT, data, data);
mbedtls_aes_free(&aes);
}
/**
* Decrypts a 16-byte (one block) message using AES-128.
*/
void decryptAES(uint8_t *data, const char *key) {
uint8_t processedKey[16]; // 128-bit key
processKey(key, processedKey, 16);
mbedtls_aes_init(&aes);
mbedtls_aes_setkey_dec(&aes, processedKey, 128);
mbedtls_aes_crypt_ecb(&aes, MBEDTLS_AES_DECRYPT, data, data);
mbedtls_aes_free(&aes);
}
void rotary_onButtonClick()
{
static unsigned long lastTimePressed = 0;
//ignore multiple press in that time milliseconds
if (millis() - lastTimePressed < 500)
{
return;
}
lastTimePressed = millis();
if(debug){
Serial.print("button pressed ");
Serial.print(millis());
Serial.println(" milliseconds after restart");
}
}
void rotary_loop()
{
//dont print anything unless value changed
if (rotaryEncoder.encoderChanged())
{
if(debug){
Serial.print("Value: ");
Serial.println(rotaryEncoder.readEncoder());
}
servoAngel = rotaryEncoder.readEncoder();
}
if (rotaryEncoder.isEncoderButtonClicked())
{
rotaryEncoder.reset(homePosition);
servoAngel = homePosition;
rotary_onButtonClick();
}
}
void IRAM_ATTR readEncoderISR()
{
rotaryEncoder.readEncoder_ISR();
}
Common Course Links
Common Course Files
Ressources et références
-
ExterneLien du site Web Heltec WiFi Kit 32heltec.org
Fichiers📁
Aucun fichier disponible.