
Lektion 52-1: Basiscode: Steuern eines Gleichstrommotors mit einem Relais unter Verwendung von Arduino
In dieser Lektion lernen wir, wie man die Richtung eines Gleichstrommotors mit zwei Relais und einem Arduino steuert. Indem wir die Polarität der an den Motor gelieferten Spannung ändern, können wir seine Richtung umkehren. Dieses Projekt ist unkompliziert und ideal für Anfänger, die das Relaissteuerung mit Arduino verstehen möchten. Achten Sie darauf, das Video anzusehen, um zusätzliche Einblicke und Demonstrationen zu erhalten (im Video bei 00:00).
In diesem Tutorial verwenden wir zwei Relais, um die Polarität der Stromversorgung für den Motor umzuschalten. Wenn ein Relais aktiviert wird, lässt es den Strom in eine Richtung fließen, sodass der Motor in eine Richtung dreht. Wenn das andere Relais aktiviert wird, kehrt es den Stromfluss um, wodurch der Motor in die entgegengesetzte Richtung dreht. Die Relais fungieren als Schalter, die vom Arduino gesteuert werden.


Hardware erklärt
Die Hauptkomponenten für dieses Projekt sind ein Arduino-Board, zwei Relais, ein Gleichstrommotor und eine Stromversorgung. Das Arduino-Board ist das Gehirn des Betriebs und sendet Signale an die Relais, um die Richtung des Motors zu steuern. Jedes Relais hat drei Anschlüsse: common (COM), normally closed (NC) und normally open (NO). Wenn es aktiviert wird, verbindet das Relais den COM-Anschluss entweder mit dem NC- oder dem NO-Anschluss und schaltet damit den Stromkreis.
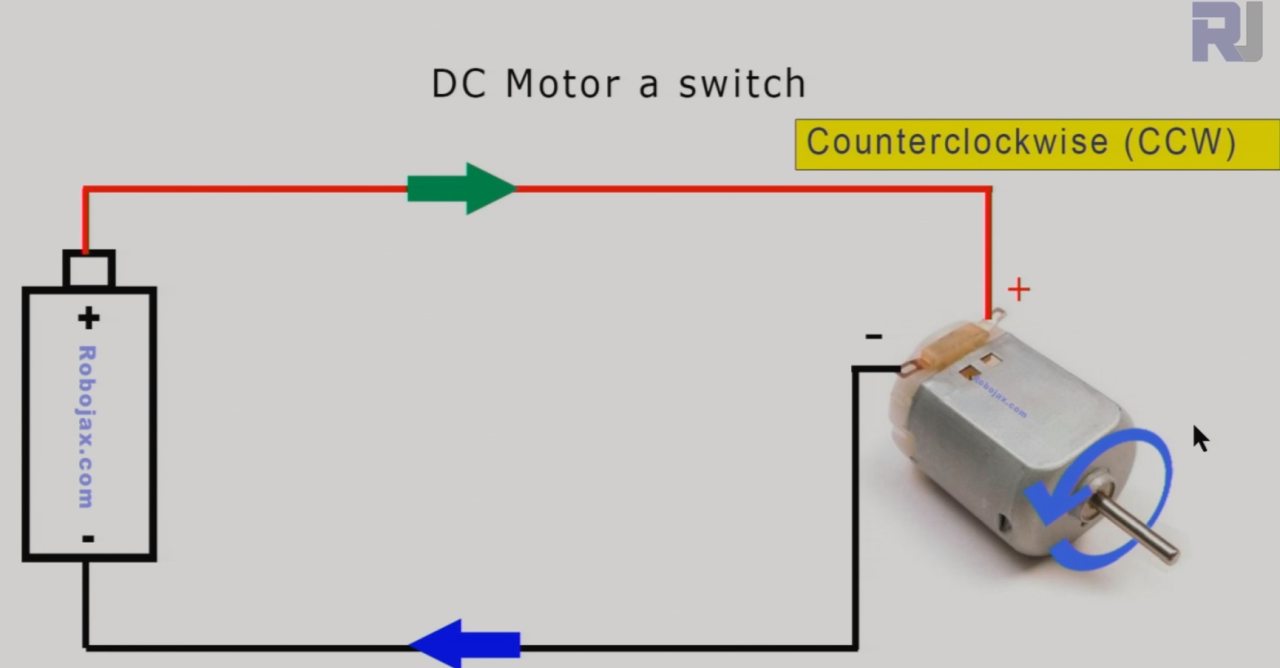
Das obige Bild zeigt, wie man die Motorleitungen mit einer Batterie verbindet, der Motor dreht sich beispielsweise gegen den Uhrzeigersinn (CCW).
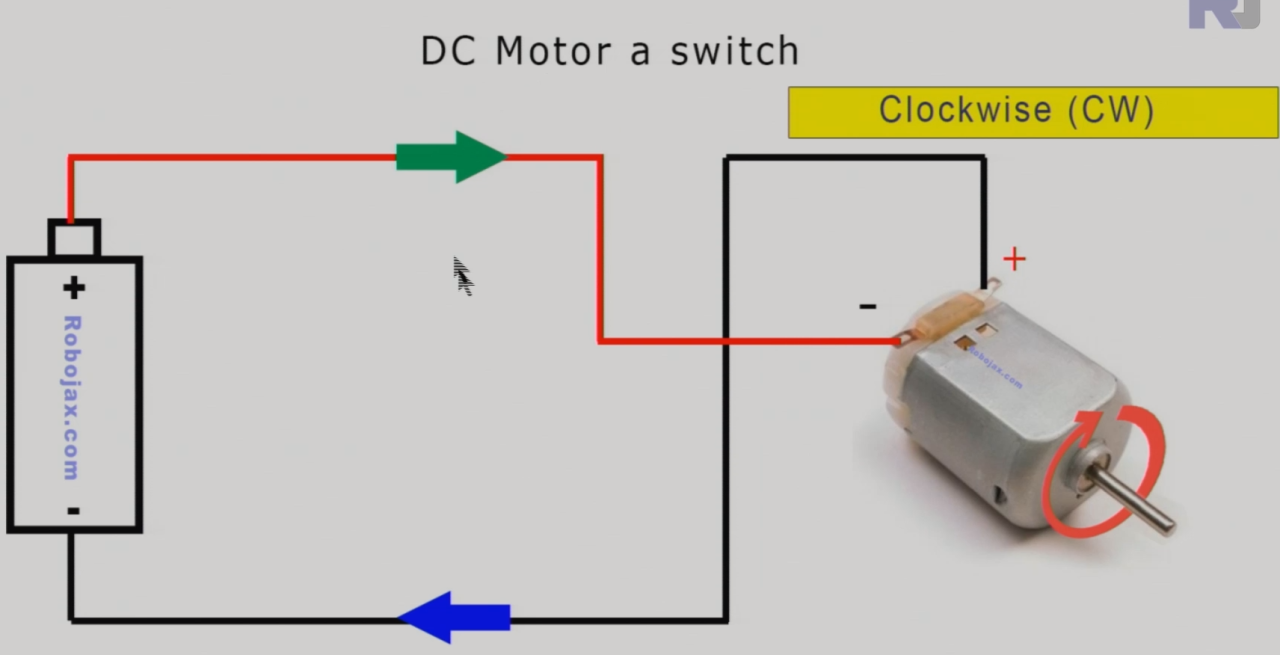
Das obige Bild zeigt, dass der Motor, wenn Sie die + und - Drähte an verschiedene Anschlüsse anschließen, beispielsweise im Uhrzeigersinn (CW) rotieren kann.
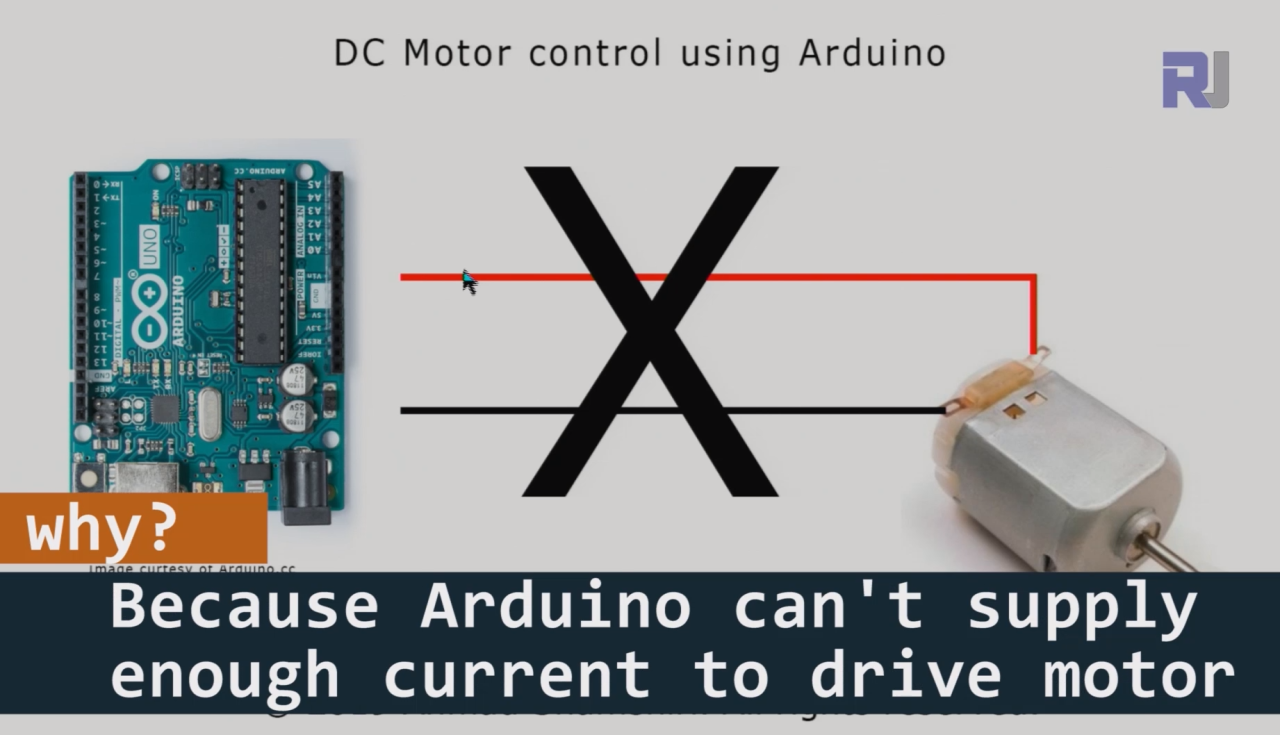
Wir können ein Relais nicht direkt an Arduino-, ESP32- oder Raspberry-Pi-Boards anschließen, da der Motor sehr hohe Ströme benötigt, um zu funktionieren.
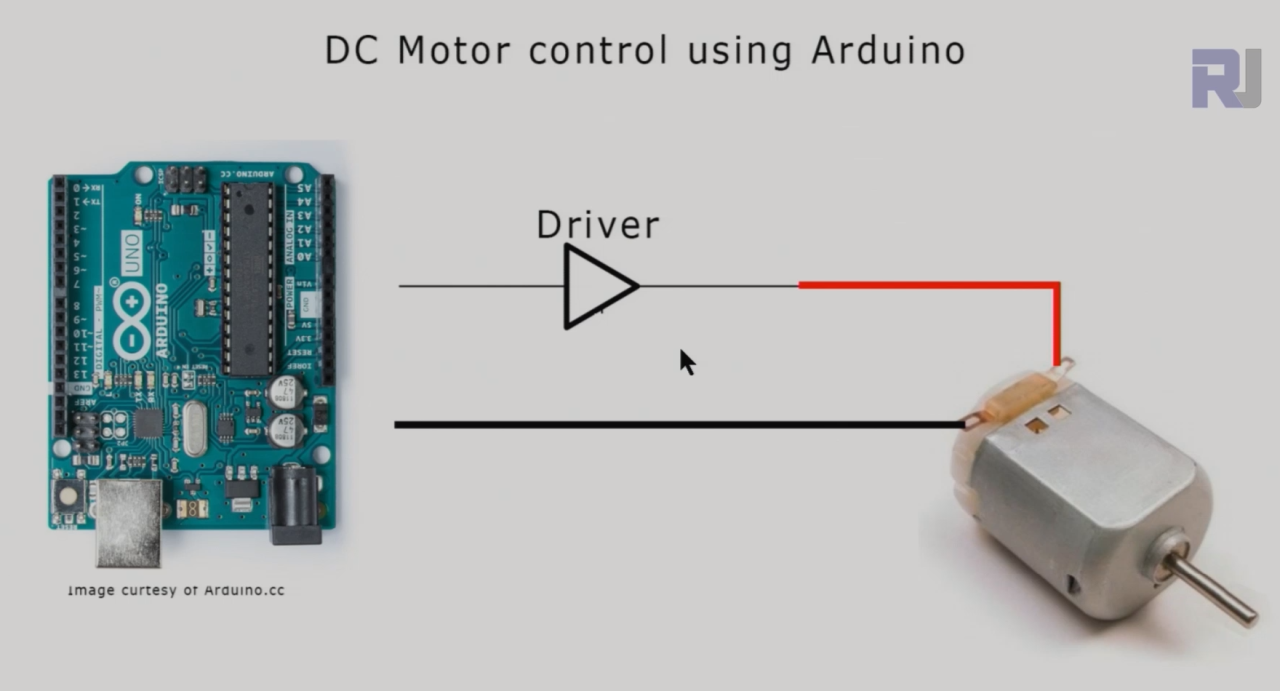
Wir benötigen einen Motortreiber, der zwischen dem Arduino und dem Motor ist.
Relais sind wichtig, da sie es dem Arduino ermöglichen, leistungsstarke Geräte wie Motoren zu steuern, ohne direkt mit ihnen verbunden zu sein. Dies ist entscheidend, da die Ausgangspins des Arduinos nur einen begrenzten Strom verarbeiten können. Durch die Verwendung von Relais können wir den Betrieb des Motors sicher vom Arduino aus steuern.
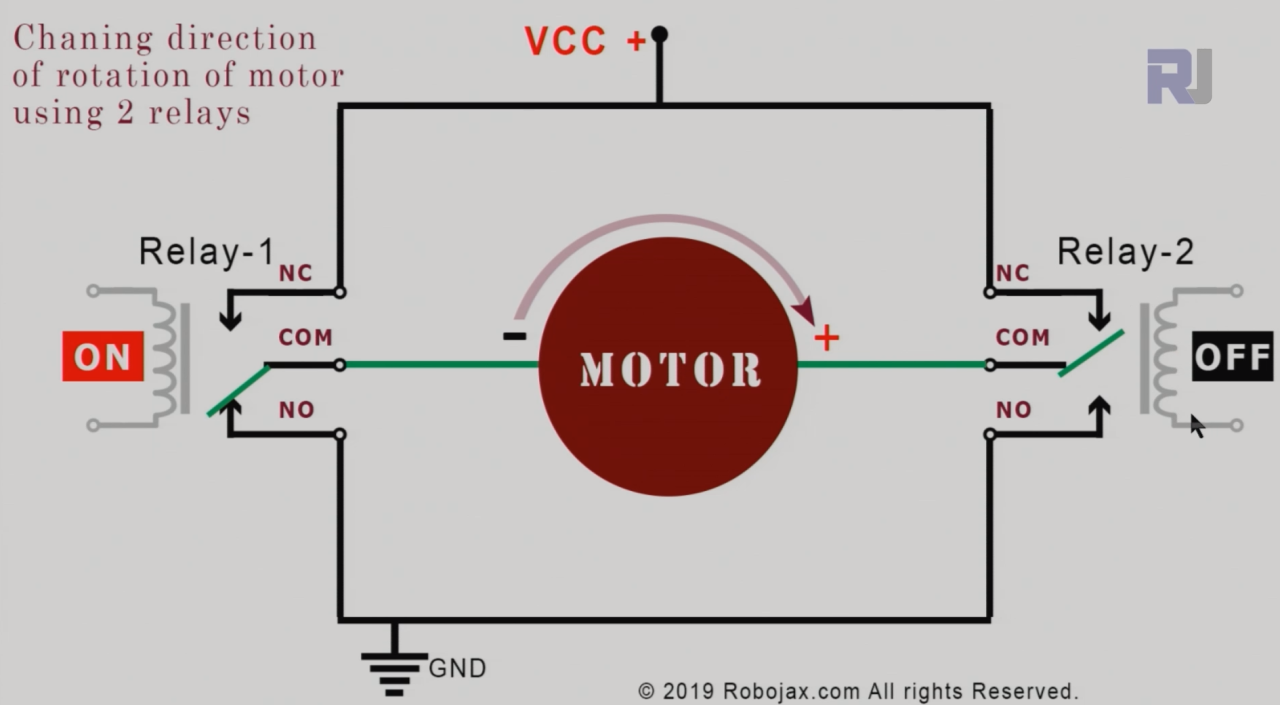
Wir können zwei Relais wie oben gezeigt anschließen, um die Drehrichtung des Motors zu steuern. Relais-1 ist AN und Relais-2 ist AUS. Jetzt dreht der Motor im Uhrzeigersinn.
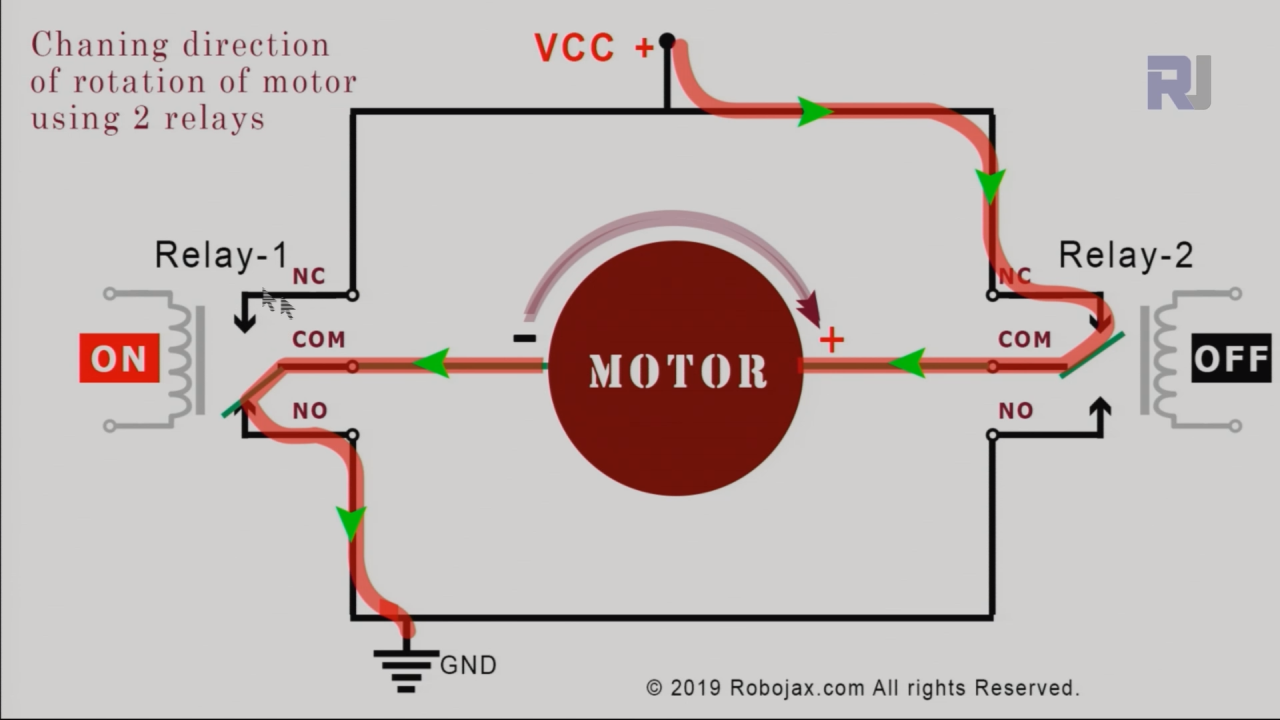
Das Bild oben zeigt den Verlauf des Stroms.
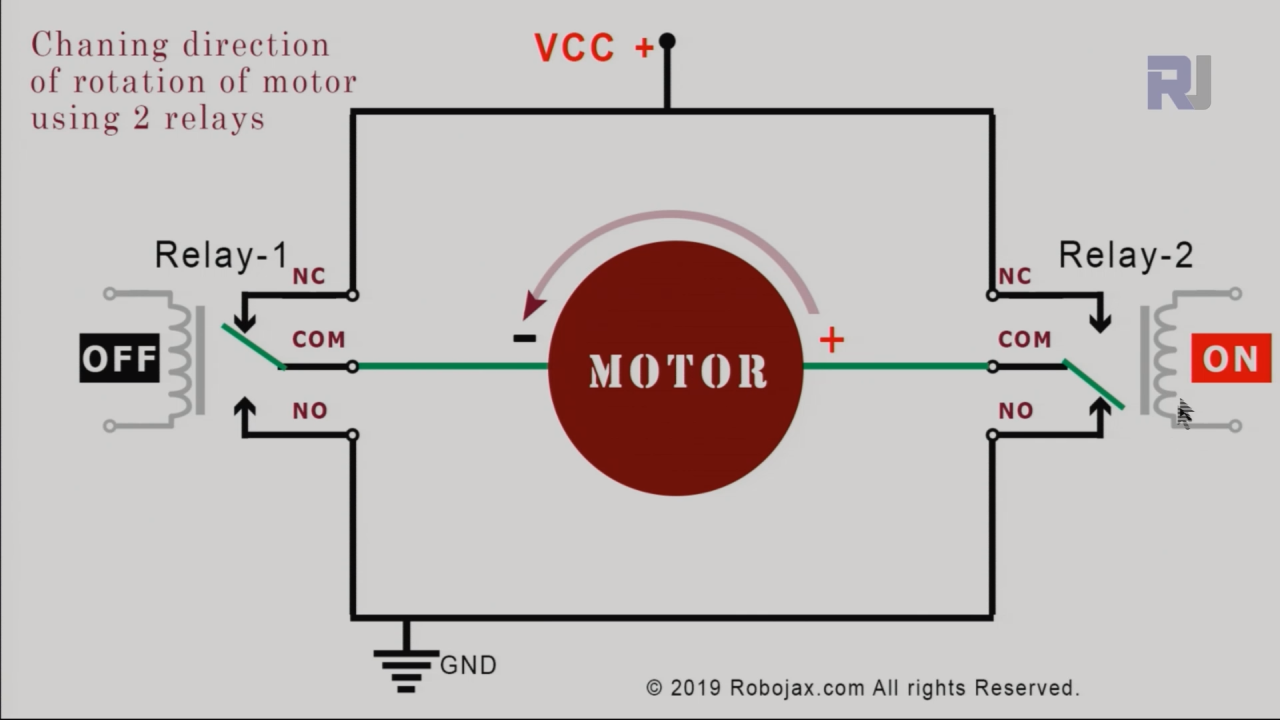
Wir können zwei Relais anschließen, wie oben gezeigt, um die Drehrichtung des Motors zu steuern. Relais-1 ist AUS und Relais-2 ist EIN. Jetzt dreht sich der Motor gegen den Uhrzeigersinn. Schau dir den Pfeil über dem Motor an.
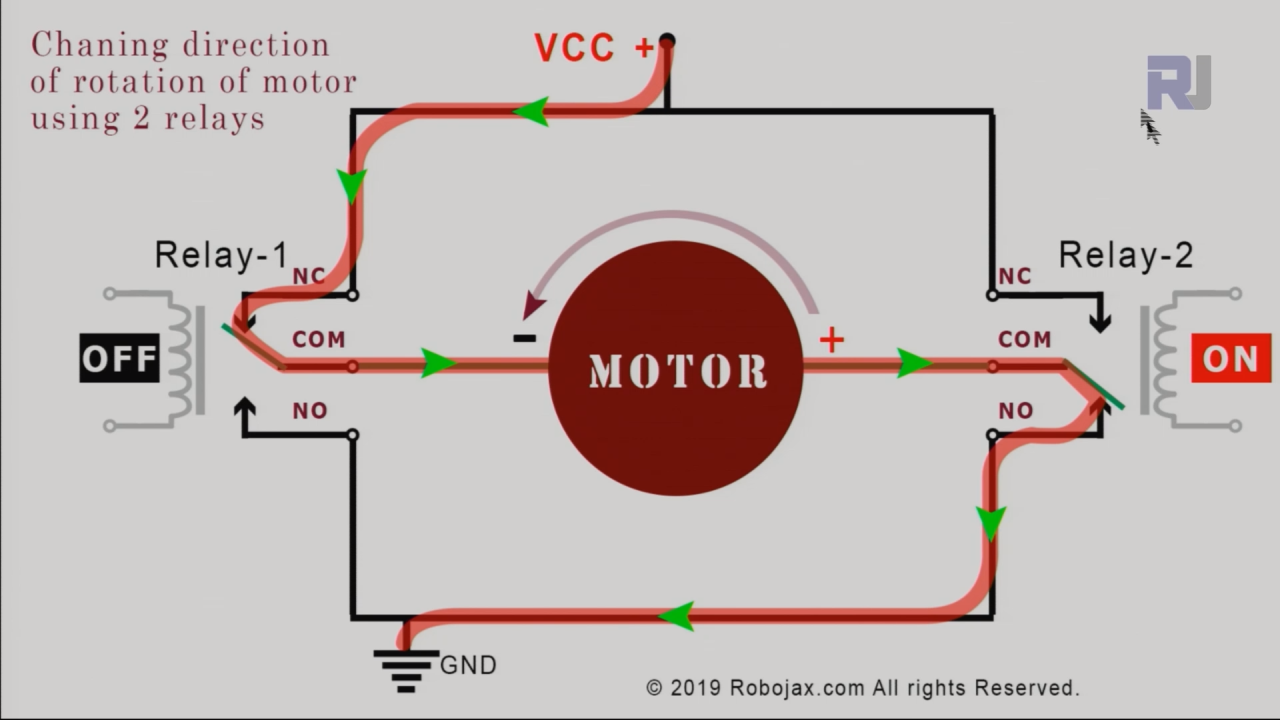
Das Bild oben zeigt den Verlauf des Stroms.
Technische Datenblätter
| Hersteller | Songle |
|---|---|
| Teilenummer | SRD-05VDC-SL-C |
| Spannung der Spule | 5 V (DC) |
| Kontaktbewertung | 10 A / 250 VAC |
| Wechselstrom | 15 A max |
| Schaltspannung | 30 V DC / 250 V AC |
| Kontaktwiderstand | ≤ 100 mΩ |
| Isolationswiderstand | ≥ 1000 MΩ |
| Betriebstemperatur | -40 bis +70 °C |
| Paket | Relaismodul mit 2 Relais |
- Stellen Sie sicher, dass die Relais für die Spannung und den Strom des Motors ausgelegt sind.
- Verwenden Sie einen gemeinsamen Bezug zwischen dem Arduino und dem Relaismodul.
- Verwenden Sie geeignete Freilaufdioden, falls erforderlich, um den Arduino vor Rück-EMK zu schützen.
- Halten Sie die Kabelwege kurz, um Widerstand und Interferenzen zu minimieren.
- Überprüfen Sie die Relaisverbindungen erneut, bevor Sie das System einschalten.
- Testen Sie den Stromkreis mit niedrigeren Spannungen, bevor Sie die volle Leistung auf den Motor anwenden.
- Beschriften Sie die Drähte zur einfachen Identifizierung während der Fehlersuche.
Verdrahtungsanweisungen


Code-Beispiele & Anleitung
Im Code definieren wir zwei Pins für die Relais mithilfe vonint relay1 = 2;undint relay2 = 3;. Diese Pins steuern den Betrieb der Relais. Diesetup()Die Funktion initialisiert diese Pins als Ausgänge und hält den Motor aus, indem sie beide Relais auf hoch setzt.
void setup() {
pinMode(relay1, OUTPUT); // set pin as output for relay 1
pinMode(relay2, OUTPUT); // set pin as output for relay 2
digitalWrite(relay1, HIGH);
digitalWrite(relay2, HIGH);
}In derloop()Funktion steuern wir die Richtung des Motors. Um den Motor gegen den Uhrzeigersinn (CCW) zu drehen, setzen wirrelay1zu niedrig undrelay2zu hoch. Dies ermöglicht, dass der Strom in eine Richtung fließt.
digitalWrite(relay1, LOW); // turn relay 1 ON
digitalWrite(relay2, HIGH); // turn relay 2 OFF
Serial.println("Rotating in CCW");
delay(3000); // wait for 3 secondsUm den Motor zu stoppen, schalten wir beide Relais aus, indem wir sie wieder hochsetzen. Dann ändern wir die Richtung, indem wir die Zustände der Relais umschalten, was es dem Motor ermöglicht, im Uhrzeigersinn (CW) zu rotieren.
digitalWrite(relay1, HIGH); // turn relay 1 OFF
digitalWrite(relay2, LOW); // turn relay 2 ON
Serial.println("Rotating in CW");
delay(3000); // wait for 3 secondsDer vollständige Code für dieses Projekt ist unter dem Artikel geladen. Stellen Sie sicher, dass Sie das Video für eine detaillierte Erklärung des Codes (im Video bei :00) ansehen.
Demonstration / Was zu erwarten ist
Wenn die Einrichtung abgeschlossen ist und der Code hochgeladen wurde, wird der Motor zunächst drei Sekunden lang gegen den Uhrzeigersinn drehen, dann zwei Sekunden lang anhalten, gefolgt von einer Drehung im Uhrzeigersinn für weitere drei Sekunden, und schließlich erneut anhalten. Dieser Zyklus wird kontinuierlich wiederholt. Häufige Fehlerquellen sind falsches Verkabeln der Relais oder das direkte Anschließen des Motors an das Arduino, was die Platine beschädigen kann. Siehe das Video zur visuellen Bestätigung des erwarteten Verhaltens (im Video bei :00).
Video-Zeiten
- 00:00 Einführung
- 04:27 Wie funktioniert es
- 08:05 Verdrahtung Erklärt
- 11:45 Grundlegender Code erklärt
- 15:25 Fortgeschrittener Code erklärt
- 18:40 Demonstration mit zwei einzelnen Relais
- 19:43 Demonstration mit einem Dual-Relaismodul
Bilder

++
/*
* Lesson 52: Control a DC motor with Relay using Arduino | Arduino Step By Step Course
Basic code
* Arduino code to change the direction of rotation
* of a DC motor with 2 relays.
*
* This is basic code. I have advanced code which can be used in both
* for Low-level trigger and High-level trigger relay with clean code.
Please watch video explaining this code: https://youtu.be/2n0vUa0cZOI
*
* Written by Ahmad Shamshiri for Robojax.com on
* Sunday, August 18, 2019
* at 20:22 in Ajax, Ontario, Canada
*
This code is available at http://robojax.com/course1/?vid=lecture52
with over 100 lectures free on YouTube. Watch it here: http://robojax.com/L/?id=338
Get the code for the course: http://robojax.com/L/?id=339
or make a donation using PayPal: http://robojax.com/L/?id=64
*
* This code is "AS IS" without warranty or liability. Free to be used as long as you keep this note intact.
* This code has been downloaded from Robojax.com
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <https://www.gnu.org/licenses/>.
*/
int relay1 = 2;
int relay2 = 3;
void setup() {
pinMode(relay1, OUTPUT);// set pin as output for relay 1
pinMode(relay2, OUTPUT);// set pin as output for relay 2
// keep the motor off by keeping both HIGH
digitalWrite(relay1, HIGH);
digitalWrite(relay2, HIGH);
Serial.begin(9600);// initialize serial monitor with 9600 baud
Serial.println("Robojax Motor Direction of Rotation");
Serial.println("Using 2 Relays");
delay(2000);
}
void loop() {
// Rotate in CCW direction
digitalWrite(relay1, LOW);// turn relay 1 ON
digitalWrite(relay2, HIGH);// turn relay 2 OFF
Serial.println("Rotating in CCW");
delay(3000);// wait for 3 seconds
// stop the motor
digitalWrite(relay1, HIGH);// turn relay 1 OFF
digitalWrite(relay2, HIGH);// turn relay 2 OFF
Serial.println("Stopped");
delay(2000);// stop for 2 seconds
// Rotate in CW direction
digitalWrite(relay1, HIGH);// turn relay 1 OFF
digitalWrite(relay2, LOW);// turn relay 2 ON
Serial.println("Rotating in CW");
delay(3000);// wait for 3 seconds
// stop the motor
digitalWrite(relay1, HIGH);// turn relay 1 OFF
digitalWrite(relay2, HIGH);// turn relay 2 OFF
Serial.println("Stopped");
delay(2000);// stop for 2 seconds
Serial.println("===============");
}// loop endDinge, die Sie vielleicht brauchen
-
eBay
Ressourcen & Referenzen
-
Extern
-
Extern
-
Extern
-
Extern
Dateien📁
Keine Dateien verfügbar.
















