
H-Bridge 1: ساخت یک درایور موتور H-bridge بر روی یک برد بورد با استفاده از ترانزیستورهای دارلینگتون TIP120 و TIP125
این آموزش شما را در ساخت یک درایور موتور H-bridge با استفاده از ترانزیستورهای دارلینگتون TIP120 و TIP125 بر روی یک برد بورد راهنمایی میکند. این تنظیمات برای کنترل جهت و سرعت یک موتور DC ایدهآل است که برای پروژههای مختلف رباتیک و اتوماسیون ضروری است. در پایان این آموزش، شما قادر خواهید بود یک موتور را با چرخشهای ساعتگرد و پادساعتگرد کنترل کنید، همراه با مدولاسیون سرعت.
در این راهنما، ما از یک آردوینو برای کنترل موتور استفاده خواهیم کرد. پیکربندی H-bridge امکان معکوس کردن جهت موتور را با کنترل سیگنالهای ورودی ارسال شده به ترانزیستورها فراهم میکند. این یک جنبه حیاتی برای بسیاری از کاربردها، مانند بازوهای رباتیک یا رباتهای متحرک است که به کنترل دقیق موتور نیاز دارند. برای توضیحات بیشتر، لطفاً به ویدیو (در ویدیو در 00:00) مراجعه کنید.
توضیح سختافزار
اجزای اصلی این پروژه شامل ترانزیستورهای TIP120 و TIP125 است که به عنوان سوئیچ برای کنترل عملکرد موتور استفاده میشوند. TIP120 یک ترانزیستور دارلینگتون NPN و TIP125 یک ترانزیستور دارلینگتون PNP است. این دو به همراه هم، پیکربندی H-bridge را تشکیل میدهند که به ما اجازه میدهد جهت جریان عبوری از موتور را کنترل کنیم.
در این تنظیم، سیگنال PWM (مدولاسیون عرض پالس) برای کنترل سرعت موتور استفاده میشود. ترانزیستورها به سرعت روشن و خاموش میشوند تا ولتاژ متوسطی ایجاد کنند که سرعت موتور را تعیین میکند. پایههای EN ترانزیستورها را فعال یا غیرفعال میکنند و اطمینان حاصل میکنند که موتور تنها زمانی که لازم است کار کند.
جزئیات برگه داده
| تولیدکننده | تگزاس اینسترومنتس |
|---|---|
| شماره قطعه | TIP120 |
| ولتاژ منطقی/ورودی و خروجی | ۵-۱۵ ولت |
| ولتاژ تأمین | ۶۰ ولت |
| جریان خروجی (به ازای هر کانال) | ۵ A |
| جریان اوج (به ازای هر کانال) | ۳۰ آ |
| راهنمایی فرکانس PWM | ۱ کیلوهرتز حداکثر |
| آستانههای منطقی ورودی | ۲.۵ ولت (بالا)، ۰.۸ ولت (پایین) |
| افت ولتاژ / RDS(on)/ اشباع | ۱.۲ ولت |
| محدودیتهای حرارتی | 175 درجه سانتیگراد |
| بسته | TO-220 |
| یادداشتها / واریانتها | به عنوان TIP125 در دسترس است |
- اطمینان حاصل کنید که برای کاربردهای با جریان بالا، هیت سینک مناسب وجود دارد.
- از سیگنالهای PWM برای کنترل مؤثر سرعت موتور استفاده کنید.
- جهت جلوگیری از آسیب به مدار، جهت ترانزیستور را بررسی کنید.
- به ولتاژها توجه کنید تا از تجاوز به محدودیتها جلوگیری شود.
- از خازنهای جداکننده برای پایدار کردن تأمین ولتاژ استفاده کنید.
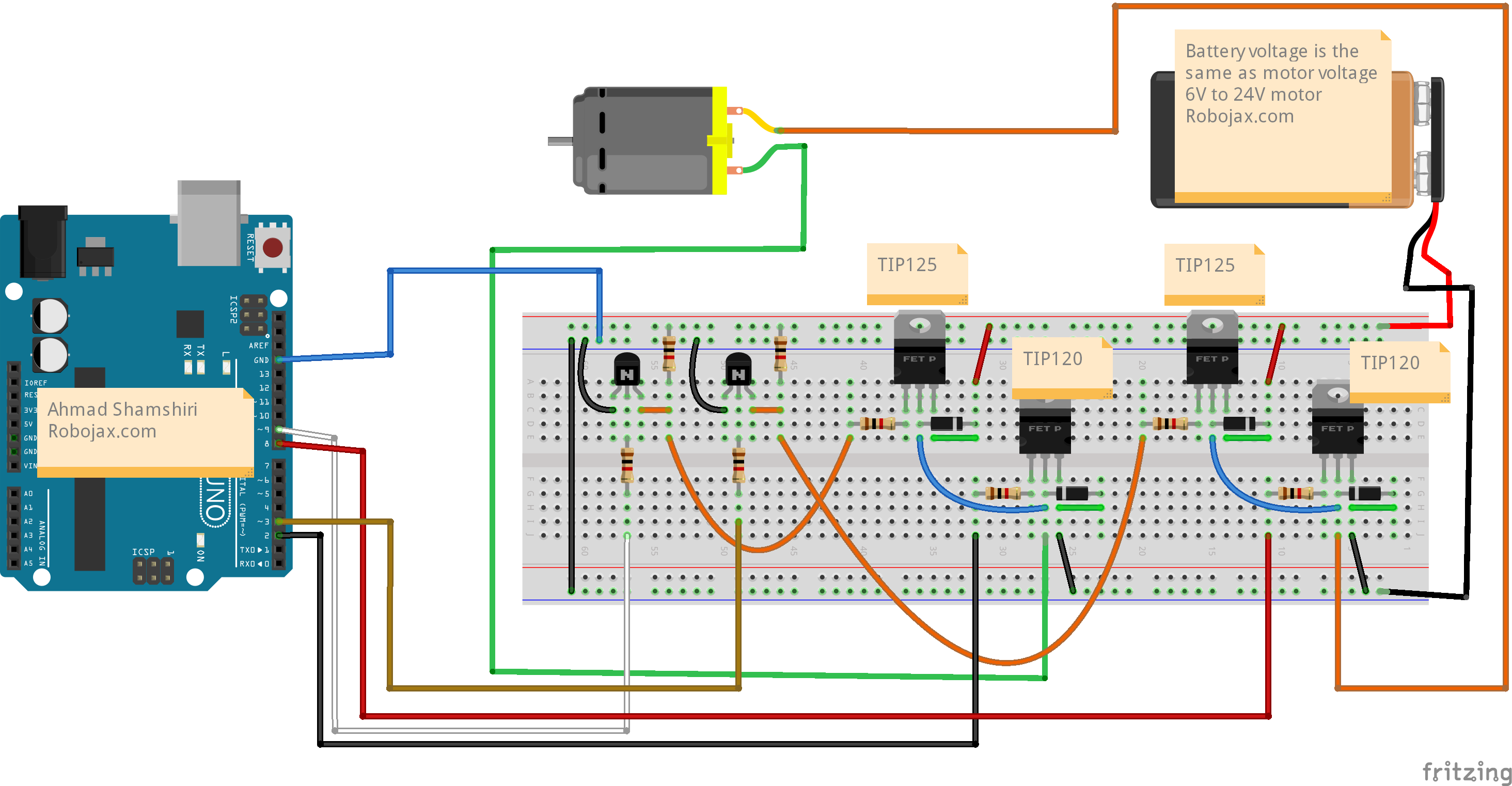
دستورالعملهای سیمکشی

برای اتصال درایور موتور H-bridge، ابتدا پایه VCC از TIP120 و TIP125 را به منبع 5V روی آردوینو خود متصل کنید. پایه GND را به زمین متصل کنید. پایههای کنترل PWM،PWM1وPWM2باید به پایههای دیجیتال ۹ و ۳ روی آردوینو متصل شوند. پایههای فعال،EN1وEN2به پایههای دیجیتال ۸ و ۲ متصل خواهد شد.
سپس پایههای موتور خود را به پایههای کلکتور ترانزیستورهای TIP120 و TIP125 متصل کنید. اطمینان حاصل کنید که موتور با منبع تغذیه شما سازگار است. اگر از اجزای اضافی مانند دیودها برای حفاظت از بازگشت EMF استفاده میکنید، آنها را به صورت موازی با پایههای موتور قرار دهید تا از آسیب ناشی از EMF بازگشتی جلوگیری شود. اگر از مدلهای مختلف آردوینو استفاده میکنید، نقشههای پایه برای سیگنالهای PWM و فعالسازی را بررسی کنید.
نمونههای شِفر (کود) و راهنمایی
const int PWM1= 9; //pin with ~
const int EN1= 8;
const int PWM2= 3; //pin with ~
const int EN2= 2;
در تنظیمات، پایههای کنترل برای سیگنالهای PWM و پایههای فعالسازی را تعریف میکنیم.pinModeاین تابع این پایهها را به عنوان خروجی تنظیم میکند تا ترانزیستورهایی را که موتور را راهاندازی میکنند، کنترل کند.
void loop() {
Motor(CW, 50); //in CW at 50% speed
delay(5000);
stop(); // stops the motor
delay(2000);
}
این تابع حلقه عملکرد موتور را نشان میدهد. ابتدا موتور را در جهت عقربههای ساعت با سرعت 50% به مدت 5 ثانیه راهاندازی میکند، سپس به مدت 2 ثانیه متوقف میشود.Motorتابع با پارامترهای جهت و سرعت فراخوانی میشود که رفتار موتور را بر اساس آن ورودیها کنترل میکند.
void Motor(boolean direction, int speed=0) {
int speedPWM = map(speed, 0, 100, 0, 255);
if(direction) {
analogWrite(PWM1, speedPWM); // Set speed for CW
} else {
analogWrite(PWM2, speedPWM); // Set speed for CCW
}
}
متن:Motorتابع یک جهت بولی و یک سرعت صحیح را میگیرد. درصد سرعت را به یک مقدار PWM نگاشت میکند و استفاده میکندanalogWriteبرای تنظیم پایه مناسب برای کنترل موتور. این عملکرد برای تغییر جهت و سرعت موتور به طور دینامیک حیاتی است.
نمایش / چه انتظاری باید داشت
پس از اتمام سیمکشی و بارگذاری شِفر (کود)، باید مشاهده کنید که موتور به مدت ۵ ثانیه با سرعت ۵۰٪ در جهت عقربههای ساعت میچرخد و سپس متوقف میشود. پس از یک تأخیر، موتور به مدت ۵ ثانیه دیگر با سرعت ۸۰٪ در جهت خلاف عقربههای ساعت میچرخد. مشکلات رایج شامل سیمکشی نادرست و تجاوز از ولتاژ مجاز است که میتواند به ترانزیستورها یا موتور آسیب برساند.
زمانبندی ویدیو
- ۰۰:۰۰- مقدمه
- ۰۱:۳۰- مرور کلی سختافزار
- ۰۳:۱۵- دستورالعملهای سیمکشی
- 05:00- مرور شِفر (کود)
- ۰۸:۴۵- نمایش
تصاویر

/*
This code is for:
Building an H-Bridge Motor driver using TIP120 and TIP125 on a breadboard and full PCB Design with Arduino
https://youtu.be/6ugrL5ziPn8
This code has been downloaded from Robojax.com
You can access the resources page and download the Gerber file to produce
the PCB or a fully assembled PCB from PCBX.com
Visit https://robojax.com/tutorial_view.php?id=392
to control a DC motor using TIP120 and TIP125 as an
H bridge
Written by Ahmad Shamshiri
26 Aug 2024
*/
const int PWM1= 9;//pin with ~
const int EN1= 8;
const int PWM2= 3;//pin with ~
const int EN2= 2;
const boolean CW =1;
const boolean CCW =0;
void Motor(boolean, int);//prototype
void brake();//prototype
void setup() {
Serial.begin(9600);
Serial.println("TIP120 H Bridge by Robojax");
pinMode(PWM1, OUTPUT);
pinMode(EN1, OUTPUT);
pinMode(PWM2, OUTPUT);
pinMode(EN2, OUTPUT);
}
void loop() {
Motor(CW, 50);//in CW at 50% speed
delay(5000);
stop();
delay(2000);
Motor(CCW, 80);//in CCW at 80% speed
delay(5000);
brake();
delay(2000);
for (int i=0; i<=100; i++)
{
Motor(CCW, i);
delay(25);
}
delay(5000);
brake();
delay(2000);
}
/*
stop()
stops the output
*/
void stop()
{
Serial.println ("=== Stop");
digitalWrite(PWM1, LOW);
digitalWrite(EN1, LOW);
digitalWrite(PWM2, LOW);
digitalWrite(EN2, LOW);
}
/*
brake()
*/
void brake()
{
Serial.println ("=== Brake");
digitalWrite(PWM1, HIGH);
digitalWrite(EN1, LOW);
digitalWrite(PWM2, HIGH);
digitalWrite(EN2, LOW);
}
void Motor(boolean direction, int speed=0)
{
int speedPWM = map(speed, 0, 100, 0, 255);
Serial.print("Speed: "); Serial.print (speedPWM);
Serial.print ("(");Serial.print (speed);Serial.print ("%)");
if(direction){
Serial.print(" dir: ");Serial.println ("CW");
analogWrite(PWM1, speedPWM);
digitalWrite(EN1, HIGH);
digitalWrite(PWM2, LOW);
digitalWrite(EN2, LOW);
}else{
Serial.print(" dir: ");Serial.println ("CCW");
digitalWrite(PWM1, LOW);
digitalWrite(EN1, LOW);
analogWrite(PWM2, speedPWM);
digitalWrite(EN2, HIGH);
}
}منابع و مراجع
-
خارجی
-
خارجی
فایلها📁
سایر فایلها
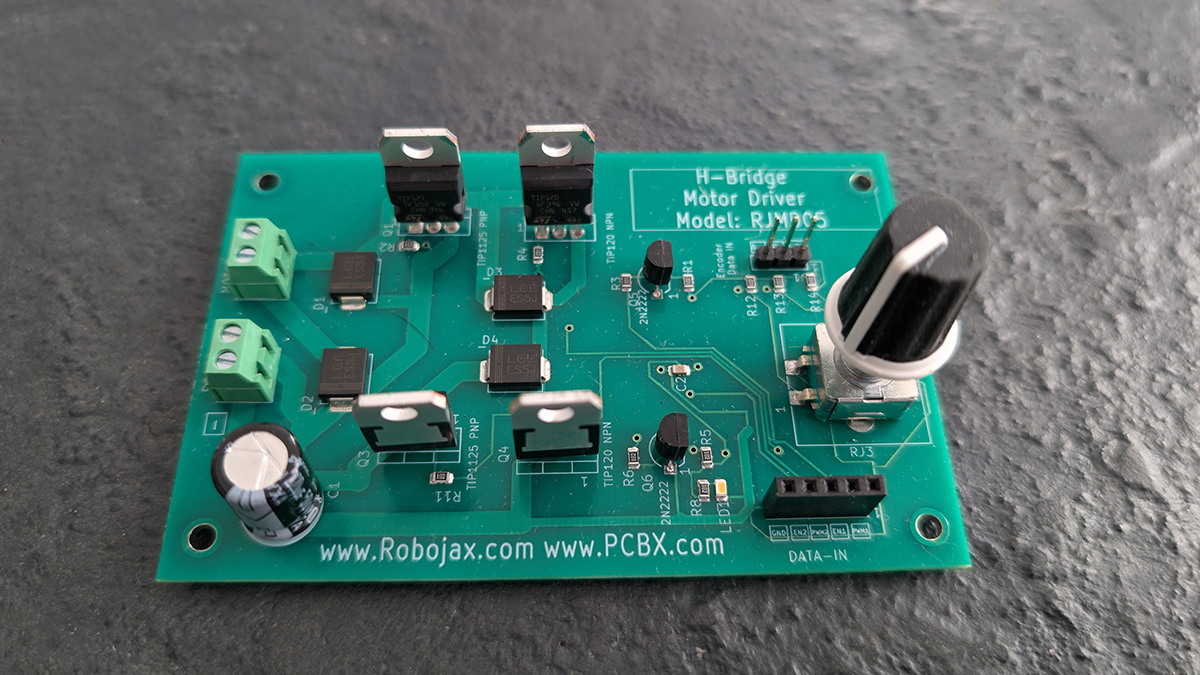
-
فایل Gerber H-Bridge-TIP120-TIP125 برای PCBXشامل فایلهای H-Bridge-TIP120-TIP125.zip، H-Bridge-TIP120-TIP125-BOM.xls و H-Bridge-TIP120-TIP125-coor.xls برای ثبت سفارش آسان است.
H-Bridge-TIP120-TIP125 Gerber file.zip0.05 MB































