
Как использовать YYNMOS-4 4-канальный MOSFET для управления постоянными моторами мощностью от 5A до 20A или светодиодными лентами
В этом уроке мы исследуем, как управлять различными постоянными нагрузками, такими как моторы и светодиодные ленты, с помощью 4-канального MOSFET-модуля YYNMOS-4. Этот модуль позволяет эффективно управлять интенсивностью света или скоростью моторов. С его способностью выдерживать нагрузки от 5A до 20A он может стать важным компонентом в ваших электронных проектах.

Мы подключим модуль MOSFET к Arduino, что позволит нам управлять нагрузками через ШИМ (широтно-импульсная модуляция). Этот подход обеспечивает плавное управление работой моторов и освещения. Для визуального руководства я рекомендую посмотреть связанное видео (в видео на 00:00).
Аппаратное обеспечение объяснено
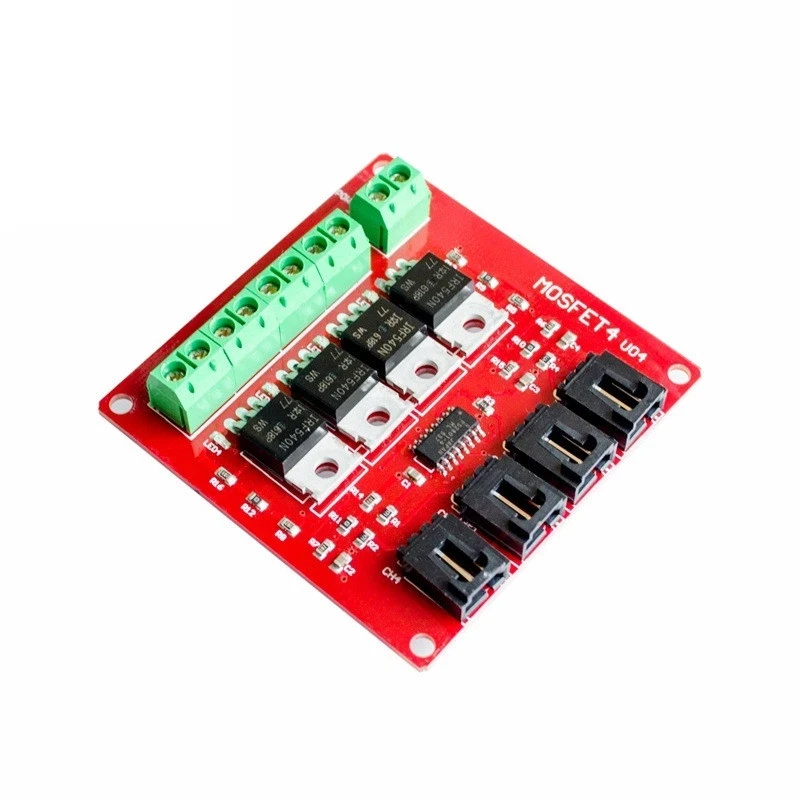
Модуль YYNMOS-4 включает четыре MOSFET, которые могут выдерживать значительные токи, что делает его идеальным для управления различными нагрузками. Каждый MOSFET работает с низким сопротивлением (от 10 до 16 миллиом при включении), что позволяет эффективно передавать энергию. Вы можете подключить до четырех устройств с максимальным током 5А каждое, и при правильном теплоотведении это может быть увеличено до 20А.
В дополнение к MOSFET-ам, модуль оснащен входными клеммами для управляющих сигналов и выходными клеммами для подключения ваших нагрузок. Вход может принимать сигналы от 3V до 20V, что делает его совместимым с большинством микроконтроллеров, включая Arduino. Модуль также включает светодиоды для индикации статуса каждого выхода, обеспечивая визуальную обратную связь во время работы.
Технические характеристики
| Производитель | YYNMOS |
|---|---|
| Номер детали | YYNMOS-4 |
| Логическое/входное напряжение | 3-20 В |
| Сетевое напряжение | 5-36 В |
| Выходной ток (на канал) | 5 A |
| Пиковый ток (на канал) | 20 А |
| Руководство по частоте ШИМ | ~1 кГц |
| Входные логические пороги | Высокий: > 3 В, Низкий: < 1 В |
| Перепад напряжения / RДС(включен)/ насыщение | 10-16 мОм |
| Тепловые ограничения | До 85°C |
| упаковка | Стандартный модуль печатной платы |
| Заметки / варианты | Совместимо с ПЛК. |
- Обеспечьте правильное теплоотведение для токов выше 5A.
- Проверьте номиналы напряжения перед подключением нагрузок.
- Используйте ШИМ-сигналы для управления скоростью или интенсивностью.
- Будьте внимательны к тепловым границам, чтобы предотвратить перегрев.
- Проверьте проводку, чтобы избежать коротких замыканий.
Инструкции по подключению


Чтобы подключить модуль YYNMOS-4, начните с подключения источника питания. Подключите положительный вывод вашего источника питания кDC+терминал на модуле и отрицательный терминал кDC-терминал. Каждую нагрузку, которую вы хотите контролировать, нужно подключить к одной из пар выходов. Например, подключите положительный контакт вашей нагрузки к соответствующему выходному терминалу, а отрицательный контакт к земле.
Для управляющих сигналов подключите пины с поддержкой ШИМ вашего Arduino к соответствующим входным пинам модуля YYNMOS-4. Например, если вы используете пины 3, 5, 6 и 9 на Arduino, подключите их к входам ШИМ на модуле. Убедитесь, что земля Arduino также подключена к земле модуля YYNMOS-4 для поддержания общей точки отсчета.
Примеры кода и руководство
Следующий фрагмент кода демонстрирует, как определить необходимые контакты и управлять моторами или светодиодами с помощью сигналов ШИМ. Переменнаяmotorявляется массивом, содержащим номера пинов для удобства справки.
int pin1 = 3; // PWM pin for motor 1
int pin2 = 5; // PWM pin for motor 2
int pin3 = 6; // PWM pin for motor 3
int pin4 = 9; // PWM pin for motor 4
int motor[]={NULL,pin1, pin2, pin3, pin4};
В этом фрагменте мы определяем четыре выводы ШИМ для управления каждым мотором или светодиодом. Массивmotorпозволяет нам легко ссылаться на эти контакты позже в коде.
Тотloop()функция показывает, как активировать motores на разных скоростях:
void loop() {
motorON(1, 75); // Run motor 1 at 75% speed
delay(4000); // Wait for 4 seconds
stop(1); // Stop motor 1
delay(3000); // Wait for 3 seconds
}
Этот сегмент кода активирует двигатель 1 на 75% скорости в течение 4 секунд, затем останавливает его на 3 секунды. Регулировка скорости и времени позволяет гибко управлять нагрузками.
Для полного кода, пожалуйста, обратитесь к программе, загруженной ниже статьи.
Демонстрация / Что ожидать
После завершения подключения проводки и загрузки кода на ваш Arduino, вы должны увидеть, как двигатели или светодиоды реагируют на сигналы ШИМ. Двигатели начнут работать с установленной скоростью и могут быть остановлены или отрегулированы динамически. Если вы заметите какие-либо проблемы, проверьте наличие обратной полярности или неправильного подключения, так как это распространенные ошибки (в видео на 12:30).
Временные метки видео
- 00:00 Начало
- 00:58 Объяснение аппаратного обеспечения
- 07:53 Объяснение проводки
- 10:13 Объяснение кода Arduino для YYNMOS-4
- 14:51 Демонстрация без Arduino
- 16:32 Демонстрация с Arduino
Изображения



++
/*
* This is Arduino code to control 4 DC motors' speed or 4 LED light strips or other DC loads
* by utilizing a YYNMOS-4 4-channel MOSFET module.
We can control 4 DC motors with voltage from 5V to 35V and 5A each.
Get the code and wiring from https://robojax.com/RJT338
* Written by Ahmad Shamshiri on July 13, 2020
* in Ajax, Ontario, Canada. www.robojax.com
*
*
* Watch video instructions for this code: https://youtu.be/G9uHVcITHf8
*
If you found this tutorial helpful, please support me so I can continue creating
content like this.
or make a donation using PayPal http://robojax.com/L/?id=64
* This code has been downloaded from Robojax.com
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <https://www.gnu.org/licenses/>.
*/
int pin1 = 3;//pwm
int pin2 = 5;//pwm
int pin3 = 6;//pwm
int pin4 = 9;//pwm
int ON = HIGH;
int OFF = LOW;
int motor[]={NULL,pin1, pin2, pin3, pin4};
void setup() {
Serial.begin(9600);
Serial.println("Robojax.com 4 DC Motor or LED");
pinMode(motor[1], OUTPUT);
pinMode(motor[2], OUTPUT);
pinMode(motor[3], OUTPUT);
pinMode(motor[4], OUTPUT);
}
void loop() {
motorON(1, 75);//run motor 1 at 75% speed
delay(4000);//for 4 seconds
motorON(4, 100);//run motor 4 at 100% speed (or 100% light intensity)
delay(4000); //for 4 seconds
stop(1);//stop motor 1
delay(3000);//keep it stopped for 3 seconds
stop(4);//stop motor 4
delay(3000); //keep it stopped for 3 seconds
for(int i=0; i<=100; i++)
{
motorON(1,i); //change speed of motor 1
delay(100);
}
delay(3000);//keep running for 3 seconds
stop(1);//stop motor 1
delay(3000);//keep it stopped for 3 seconds
for(int i=100; i>=0; i--)
{
motorON(1,i); //change speed of motor 1
delay(100);
}
delay(3000); //keep it running for 3 seconds
for(int i=0; i<=100; i++)
{
motorON(4,i);
delay(100);
}
delay(3000);//keep it at for 3 seconds
for(int i=100; i>=0; i--)
{
motorON(4,i);
delay(100);
}
}// loop
/*
motorON(int n, int sp)
* @brief Runs the specific motor n with speed sp
* @param n, is an integer from 1 to 4
* @param sp, is speed in % from 0 to 100
* @return does not return anything
* Written by Ahmad Shamshiri
* www.Robojax.com code July 13, 2020 in Ajax, Ontario, Canada
*/
void motorON(int n, int sp)
{
if(n >=1 && n <=4)
{
int speed=map(sp, 0, 100, 0, 255);
analogWrite(motor[n],speed);
Serial.print("Load ");
Serial.print(n);
Serial.print(" @");
Serial.print(sp);
Serial.println("%");
}else{
Serial.println("Motor/load number should be between 1 and 4");
while(1);// stop forever
}
}//motorON(int n)
/*
stop(int n)
* @brief Stops the specific motor
* @param n, is an integer from 1 to 4
* @return does not return anything
* Written by Ahmad Shamshiri
* www.Robojax.com code July 13, 2020 in Ajax, Ontario, Canada
*/
void stop(int n)
{
if(n >=1 && n <=4)
{
digitalWrite(motor[n], LOW);
Serial.print("Load ");
Serial.print(n);
Serial.println(" Stopped");
}else{
Serial.println("Motor/load number should be between 1 and 4");
while(1);// stop forever
}
}//stop(int n)Вещи, которые могут вам понадобиться
-
Амазонка
-
eBay
-
АлиЭкспрессКупите YYNMOS-4 4-канальный MOSFET на AliExpresss.click.aliexpress.com
-
АлиЭкспрессКупите YYNMOS-4 4-канальный МОП-транзистор на AliExpresss.click.aliexpress.com
-
АлиЭкспрессКупите YYNMOS-4 4-канальный МОП-транзистор на AliExpresss.click.aliexpress.com
Ресурсы и ссылки
-
Внешний1N4148 (T4) SMD fast-switching diode datasheet (PDF)pdf.datasheetcatalog.com
-
Внешний60N03 MOSFET, 12mΩ, 30V, 45A datasheet (PDF)cdn.datasheetspdf.com
-
Внешний
Файлы📁
Нет доступных файлов.


































