
Wie man einen YYNMOS-4 4-Kanal MOSFET verwendet, um 5A bis 20A Gleichstrommotoren oder LED-Lichtstreifen zu steuern
In diesem Tutorial werden wir erkunden, wie man verschiedene Gleichstromlasten, wie Motoren und LED-Lichtstreifen, mit dem YYNMOS-4 4-Kanal-MOSFET-Modul steuern kann. Dieses Modul ermöglicht es Ihnen, die Intensität von Lichtern oder die Geschwindigkeit von Motoren effektiv zu verwalten. Mit seiner Fähigkeit, Lasten zwischen 5A und 20A zu bewältigen, kann es ein wesentliches Element in Ihren Elektronikprojekten sein.

Wir werden das MOSFET-Modul mit einem Arduino verbinden, was uns ermöglicht, die Lasten über PWM (Pulsweitenmodulation) zu steuern. Dieser Ansatz ermöglicht eine sanfte Steuerung des Betriebs von Motoren und Lichtern. Für eine visuelle Anleitung empfehle ich, das dazugehörige Video anzusehen (im Video bei 00:00).
Hardware Erklärt
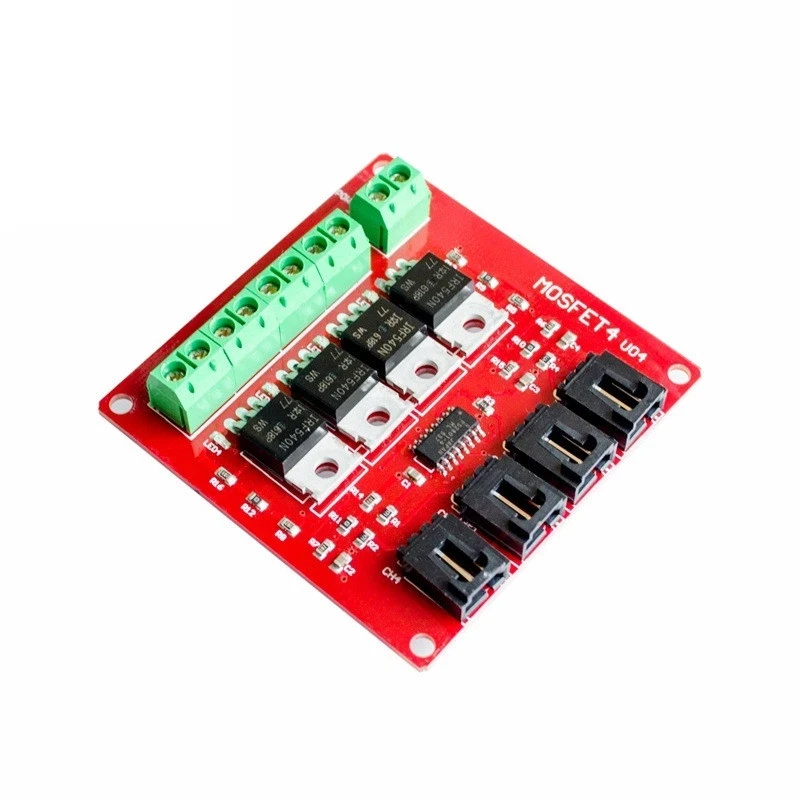
Das YYNMOS-4-Modul umfasst vier MOSFETs, die erhebliche Ströme bewältigen können, was es ideal für das Ansteuern verschiedener Lasten macht. Jeder MOSFET arbeitet mit lowen Widerständen (10 bis 16 Milli-Ohm im eingeschalteten Zustand), was eine effiziente Stromversorgung ermöglicht. Sie können bis zu vier Geräte mit einem maximalen Strom von jeweils 5A anschließen, und bei ordnungsgemäßer Kühlung kann dies auf 20A erhöht werden.
Zusätzlich zu den MOSFETs verfügt das Modul über Eingangsanschlüsse für Steuersignale und Ausgangsanschlüsse zum Anschließen Ihrer Lasten. Der Eingang kann Signale von 3V bis 20V annehmen, was es mit den meisten Mikrocontrollern, einschließlich Arduino, kompatibel macht. Das Modul enthält auch LEDs, um den Status jedes Ausgangs anzuzeigen, was während des Betriebs visuelles Feedback bietet.
Datenblattdetails
| Hersteller | YYNMOS |
|---|---|
| Teilenummer | YYNMOS-4 |
| Logik/IO-Spannung | 3-20 V |
| Versorgungsspannung | 5-36 V |
| Ausgangsstrom (pro Kanal) | 5 A |
| Spitzenstrom (pro Kanal) | 20 A |
| PWM-Frequenzrichtlinien | ~1 kHz |
| Eingangslogikschwellen | Hoch: > 3 V, Niedrig: < 1 V |
| Spannungsabfall / RDS(on)/ Sättigung | 10-16 mΩ |
| Thermische Grenzen | Bis zu 85°C |
| Paket | Standard-PCB-Modul |
| Hinweise / Varianten | Kompatibel mit SPS |
- Stellen Sie eine ordnungsgemäße Wärmeableitung für Ströme über 5A sicher.
- Überprüfen Sie die Spannungswerte, bevor Sie Lasten anschließen.
- Verwenden Sie PWM-Signale zur Steuerung von Geschwindigkeit oder Intensität.
- Achten Sie auf thermische Grenzwerte, um eine Überhitzung zu verhindern.
- Überprüfen Sie die Verdrahtung erneut, um Kurzschlüsse zu vermeiden.
Verdrahtungsanweisungen


Um das YYNMOS-4-Modul zu verdrahten, beginnen Sie mit dem Anschließen der Stromversorgung. Schließen Sie die positive Klemme Ihrer Stromquelle an dieDC+Terminal am Modul und den negativen Anschluss zu derDC-Terminal. Jede Last, die Sie steuern möchten, wird mit einem der Ausgangspaare verbunden. Zum Beispiel verbinden Sie den positiven Anschluss Ihrer Last mit dem jeweiligen Ausgangsterminal und den negativen Anschluss mit dem Erdungspunkt.
Für Steuersignale verbinden Sie die PWM-fähigen Pins Ihres Arduino mit den entsprechenden Eingabepins des YYNMOS-4-Moduls. Wenn Sie beispielsweise die Pins 3, 5, 6 und 9 auf dem Arduino verwenden, verbinden Sie diese mit den PWM-Eingängen des Moduls. Stellen Sie sicher, dass der Ground des Arduino auch mit dem Ground des YYNMOS-4-Moduls verbunden ist, um einen gemeinsamen Bezugspunkt aufrechtzuerhalten.
Codebeispiele und Schritt-für-Schritt-Anleitungen
Der folgende Code-Ausschnitt zeigt, wie man die notwendigen Pins definiert und die Motoren oder LEDs mit PWM-Signalen steuert. Die Variablemotorist ein Array, das die Pin-Nummern zur einfachen Referenz speichert.
int pin1 = 3; // PWM pin for motor 1
int pin2 = 5; // PWM pin for motor 2
int pin3 = 6; // PWM pin for motor 3
int pin4 = 9; // PWM pin for motor 4
int motor[]={NULL,pin1, pin2, pin3, pin4};
In diesem Auszug definieren wir vier PWM-Pins zur Steuerung jedes Motors oder jeder LED. Das Arraymotorerlaubt es uns, diese Pins später im Code einfach zu referenzieren.
Dieloop()Die Funktion zeigt, wie man die Motoren mit unterschiedlichen Geschwindigkeiten aktiviert:
void loop() {
motorON(1, 75); // Run motor 1 at 75% speed
delay(4000); // Wait for 4 seconds
stop(1); // Stop motor 1
delay(3000); // Wait for 3 seconds
}
Dieses Code-Segment aktiviert Motor 1 mit 75% Geschwindigkeit für 4 Sekunden und stoppt ihn dann für 3 Sekunden. Die Anpassung von Geschwindigkeit und Timing ermöglicht eine flexible Steuerung der Lasten.
Für den vollständigen Code beachten Sie bitte das vollständige Programm, das unter dem Artikel geladen ist.
Demonstration / Was zu erwarten ist
Nach Abschluss der Verkabelung und dem Hochladen des Codes auf Ihren Arduino sollten Sie beobachten, wie die Motoren oder LEDs auf die PWM-Signale reagieren. Die Motoren starten mit den definierten Geschwindigkeiten und können dynamisch gestoppt oder angepasst werden. Wenn Sie Probleme feststellen, überprüfen Sie die umgekehrte Polarität oder falsche Verkabelungen, da dies häufige Fallstricke sind (im Video um 12:30).
Video-Zeiten
- 00:00 Start
- 00:58 Hardware Erklärt
- 07:53 Verkabelung Erklärt
- 10:13 Arduino-Code für YYNMOS-4 erklärt
- 14:51 Demonstration ohne Arduino
- 16:32 Demonstration mit Arduino
Bilder



++
/*
* This is Arduino code to control 4 DC motors' speed or 4 LED light strips or other DC loads
* by utilizing a YYNMOS-4 4-channel MOSFET module.
We can control 4 DC motors with voltage from 5V to 35V and 5A each.
Get the code and wiring from https://robojax.com/RJT338
* Written by Ahmad Shamshiri on July 13, 2020
* in Ajax, Ontario, Canada. www.robojax.com
*
*
* Watch video instructions for this code: https://youtu.be/G9uHVcITHf8
*
If you found this tutorial helpful, please support me so I can continue creating
content like this.
or make a donation using PayPal http://robojax.com/L/?id=64
* This code has been downloaded from Robojax.com
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <https://www.gnu.org/licenses/>.
*/
int pin1 = 3;//pwm
int pin2 = 5;//pwm
int pin3 = 6;//pwm
int pin4 = 9;//pwm
int ON = HIGH;
int OFF = LOW;
int motor[]={NULL,pin1, pin2, pin3, pin4};
void setup() {
Serial.begin(9600);
Serial.println("Robojax.com 4 DC Motor or LED");
pinMode(motor[1], OUTPUT);
pinMode(motor[2], OUTPUT);
pinMode(motor[3], OUTPUT);
pinMode(motor[4], OUTPUT);
}
void loop() {
motorON(1, 75);//run motor 1 at 75% speed
delay(4000);//for 4 seconds
motorON(4, 100);//run motor 4 at 100% speed (or 100% light intensity)
delay(4000); //for 4 seconds
stop(1);//stop motor 1
delay(3000);//keep it stopped for 3 seconds
stop(4);//stop motor 4
delay(3000); //keep it stopped for 3 seconds
for(int i=0; i<=100; i++)
{
motorON(1,i); //change speed of motor 1
delay(100);
}
delay(3000);//keep running for 3 seconds
stop(1);//stop motor 1
delay(3000);//keep it stopped for 3 seconds
for(int i=100; i>=0; i--)
{
motorON(1,i); //change speed of motor 1
delay(100);
}
delay(3000); //keep it running for 3 seconds
for(int i=0; i<=100; i++)
{
motorON(4,i);
delay(100);
}
delay(3000);//keep it at for 3 seconds
for(int i=100; i>=0; i--)
{
motorON(4,i);
delay(100);
}
}// loop
/*
motorON(int n, int sp)
* @brief Runs the specific motor n with speed sp
* @param n, is an integer from 1 to 4
* @param sp, is speed in % from 0 to 100
* @return does not return anything
* Written by Ahmad Shamshiri
* www.Robojax.com code July 13, 2020 in Ajax, Ontario, Canada
*/
void motorON(int n, int sp)
{
if(n >=1 && n <=4)
{
int speed=map(sp, 0, 100, 0, 255);
analogWrite(motor[n],speed);
Serial.print("Load ");
Serial.print(n);
Serial.print(" @");
Serial.print(sp);
Serial.println("%");
}else{
Serial.println("Motor/load number should be between 1 and 4");
while(1);// stop forever
}
}//motorON(int n)
/*
stop(int n)
* @brief Stops the specific motor
* @param n, is an integer from 1 to 4
* @return does not return anything
* Written by Ahmad Shamshiri
* www.Robojax.com code July 13, 2020 in Ajax, Ontario, Canada
*/
void stop(int n)
{
if(n >=1 && n <=4)
{
digitalWrite(motor[n], LOW);
Serial.print("Load ");
Serial.print(n);
Serial.println(" Stopped");
}else{
Serial.println("Motor/load number should be between 1 and 4");
while(1);// stop forever
}
}//stop(int n)Dinge, die Sie vielleicht brauchen
-
Amazon
-
eBay
-
AliExpressKaufe YYNMOS-4 4-Kanal MOSFET von AliExpresss.click.aliexpress.com
-
AliExpressKaufen Sie YYNMOS-4 4 Kanal MOSFET bei AliExpress.s.click.aliexpress.com
-
AliExpressKaufen Sie YYNMOS-4 4-Kanal-MOSFET bei AliExpress.s.click.aliexpress.com
Ressourcen & Referenzen
-
Extern1N4148 (T4) SMD-Fast-Switch-Diode-Datenblatt (PDF)pdf.datasheetcatalog.com
-
Extern60N03 MOSFET, 12mΩ, 30V, 45A Datenblatt (PDF)cdn.datasheetspdf.com
-
Extern
Dateien📁
Keine Dateien verfügbar.


































