Usando um Sensor de Distância a Laser VL53L1X para Medir Distâncias de até 4 Metros
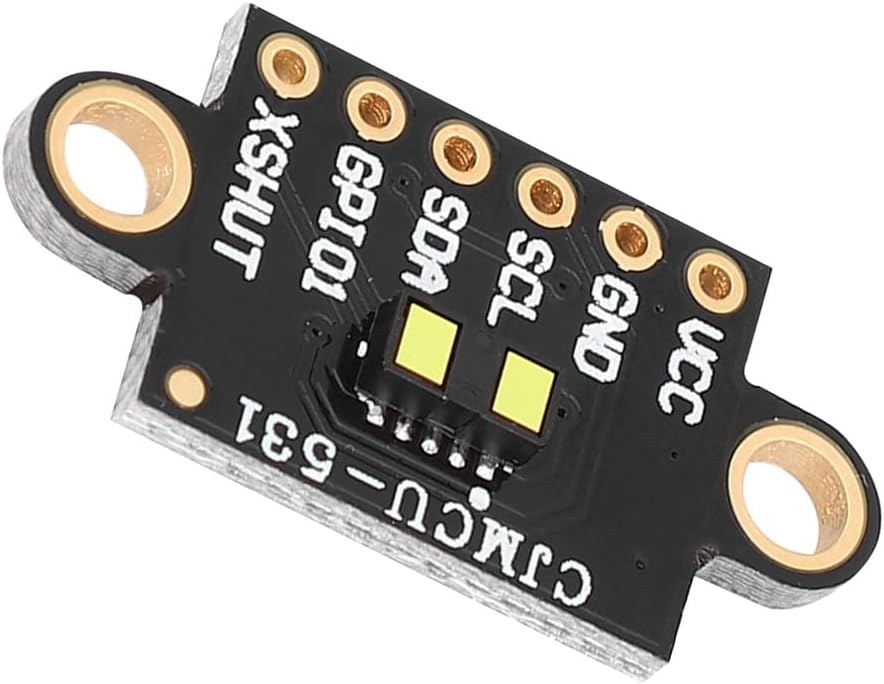
O VL53L1X é um sensor de distância a laser baseado em tempo de voo, capaz de medir distâncias de até 4 metros com alta precisão. Este sensor se comunica via I2C e é versátil para várias aplicações, como robótica e automação. Neste tutorial, vamos explorar como configurar o sensor VL53L1X com um Arduino e ler os valores de distância de forma eficaz.
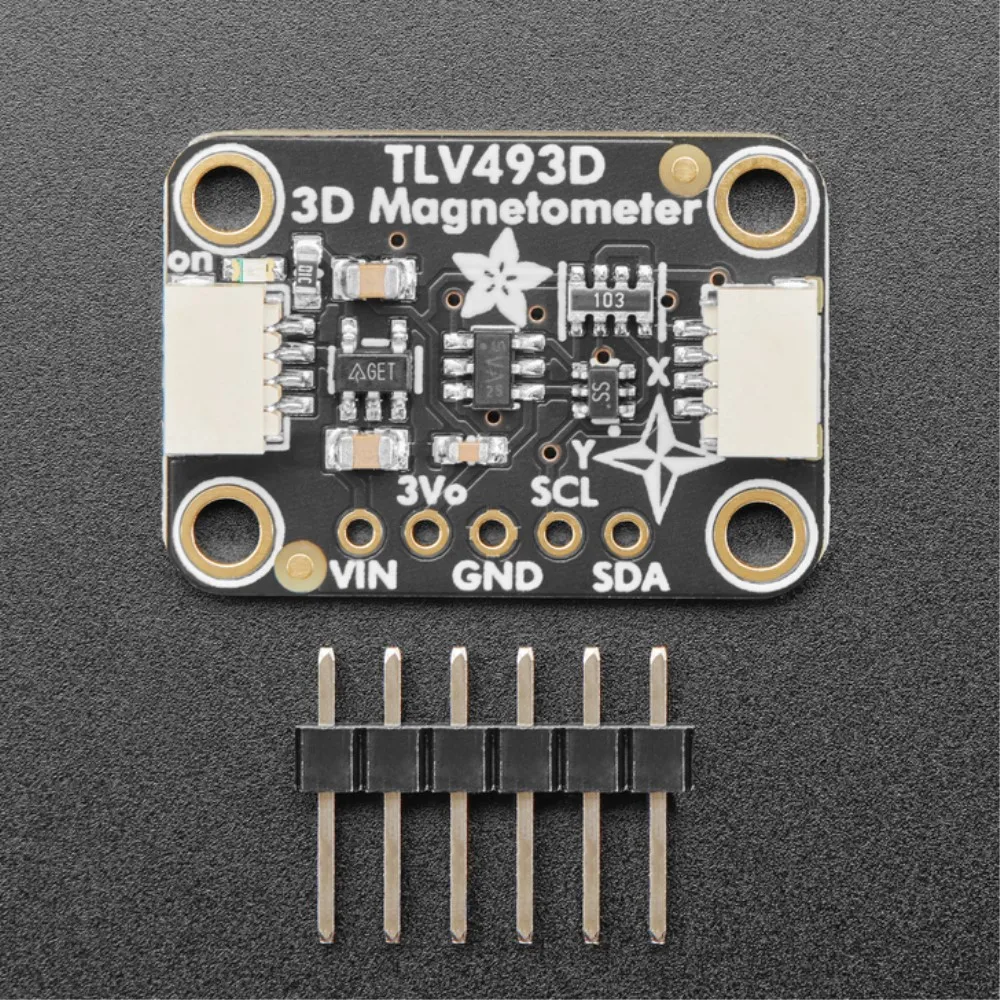
O sensor é alimentado por 3,3V ou 5V e possui múltiplos pinos para comunicação I2C, incluindo SDA e SCL. O sensor pode medir distâncias a uma frequência de 50Hz, permitindo leituras de distância rápidas. Este tutorial o guiará pelo processo de fiação e pelo código necessário para operar o sensor suavemente. Para mais esclarecimentos, você pode conferir o vídeo (no vídeo às 00:00).
Hardware Explicado
O componente principal deste projeto é o sensor de distância a laser VL53L1X, que utiliza uma tecnologia conhecida como tempo de voo (ToF) para medir distâncias. Isso significa que ele calcula a distância até um objeto cronometrando quanto tempo leva para um pulso de laser retornar após atingir um objeto. O sensor possui comunicação I2C, que permite fácil integração com microcontroladores como o Arduino. Além do sensor, você precisará de uma placa Arduino para processamento. O Arduino irá gerenciar a comunicação com o VL53L1X e exibir as distâncias medidas. A configuração é simples, pois o sensor pode ser alimentado diretamente pelos pinos de saída do Arduino.
Detalhes da Ficha Técnica
| Fabricante | STMicroelectronics |
|---|---|
| Número da peça | VL53L1X |
| Tensão de lógica/IO | 3,3 - 5 V |
| Tensão de alimentação | 2.6 - 5.5 V |
| Corrente de saída (por canal) | Não se aplica |
| Corrente de pico (por canal) | Não aplicável |
| Orientação sobre frequência PWM | Não aplicável |
| Limiares de lógica de entrada | 0,3 × VCC (baixo), 0,7 × VCC (alto) |
| Queda de tensão / RDS(on)/ saturação | Não aplicável |
| Limites térmicos | 0 a 85 °C |
| Pacote | 4,9 x 2,5 x 1,6 mm |
| Notas / variantes | Sensor de tempo de voo de longo alcance |
- Alimente o sensor com 3,3V ou 5V, conforme necessário.
- Use os pinos I2C, SDA e SCL, para comunicação.
- Defina o modo de distância de acordo com suas necessidades (curto, médio, longo).
- Certifique-se de que o sensor está calibrado para leituras de distância precisas.
- Manuseie as condições de luz ambiente com cuidado, pois elas podem afetar as medições.
Instruções de Fiação

Para conectar o sensor VL53L1X a um Arduino, conecte o pino VCC do sensor ao pino 5V do Arduino usando um fio vermelho. Conecte o pino de terra (GND) do sensor ao GND do Arduino usando um fio marrom. Para a comunicação I2C, conecte o pino SDA do sensor ao pino A4 do Arduino usando um fio amarelo e o pino SCL ao pino A5 usando um fio verde. Se você quiser usar os pinos opcionais de interrupção e desligamento, conecte o pino de desligamento ao pino digital 2 e o pino de interrupção ao pino digital 3, mas esses não são necessários para a operação básica.
Exemplos de Código e Passo a Passo
No código, primeiro incluímos as bibliotecas necessárias e definimos os pinos para o sensor. Criamos uma instância do sensor com a linha:
SFEVL53L1X distanceSensor;Esta linha inicializa o sensor, permitindo-nos chamar seus métodos mais tarde no programa. Em seguida, configuramos a comunicação I2C e inicializamos o sensor:
void setup(void)
{
Wire.begin();
Serial.begin(9600);
Serial.println("VL53L1X Qwiic Test");
if (distanceSensor.begin() == 0) //Begin returns 0 on a good init
{
Serial.println("Sensor online!");
}
}Neste trecho, começamos a comunicação I2C comWire.begin()e verifique se o sensor foi inicializado com sucesso. Finalmente, para ler a distância, usamos o seguinte código no loop:
void loop(void)
{
int distance = distanceSensor.getDistance(); // Get distance
Serial.print("Distance: ");
Serial.println(distance);
}Este código recupera a medição de distância e a imprime no monitor serial. O loop lê continuamente a distância, permitindo atualizações em tempo real. Para um exemplo de código completo, consulte o código completo carregado abaixo do artigo.
Demonstração / O Que Esperar
Quando o sensor está configurado corretamente, você pode esperar que ele forneça medições de distância precisas de até 4 metros. Você pode observar pequenas flutuações nas leituras, especialmente em condições de iluminação variadas (no vídeo às 10:30). É essencial garantir que o sensor esteja limpo e desobstruído para obter resultados precisos. Se você encontrar leituras incomuns, verifique se o sensor está alimentado corretamente e se as conexões I2C estão seguras. O desempenho do sensor pode ser afetado pelo ambiente, particularmente em luz intensa ou superfícies reflexivas.
Marcadores de Vídeo
- 00:00 Iniciar
- 00:40 Introdução
- 03:42 Ficha Técnica Visitada
- 06:48 Soldando cabeçotes de pino
- 08:22 Fiação explicada
- 09:06 Código explicado
- 11:53 Demonstração
- 16:03 Demonstração em Completamente Escuro
Imagens

/*
* This is a code example using the VL53L1X Laser Range Sensor from STMicroelectronics
* Using a library from SparkFun (see below)
*
* Watch a video instruction for this code: https://youtu.be/Sc_iVfeocvg
* A wiring diagram is available at https://robojax.com/RJT232
* Updated by Ahmad Shamshiri on November 4, 2019
* in Ajax, Ontario, Canada. www.robojax.com
*
* Get this code and other Arduino codes from Robojax.com.
Learn Arduino step by step in a structured course with all materials, wiring diagrams and libraries
all in one place.
If you found this tutorial helpful, please support me so I can continue creating
content like this.
or make a donation using PayPal http://robojax.com/L/?id=64
*
* https://www.st.com/content/ccc/resource/technical/document/user_manual/group0/98/0d/38/38/5d/84/49/1f/DM00474730/files/DM00474730.pdf/jcr:content/translations/en.DM00474730.pdf
* https://www.st.com/resource/en/datasheet/vl53l1x.pdf
*
Reading distance from the laser-based VL53L1X
By: Nathan Seidle
Revised by: Andy England
SparkFun Electronics
Date: April 4th, 2018
License: This code is public domain but you buy me a beer if you use this and we meet someday (Beerware license).
SparkFun labored with love to create this code. Feel like supporting open-source hardware?
Buy a board from SparkFun! https://www.sparkfun.com/products/14667
This example prints the distance to an object.
Are you getting weird readings? Be sure the vacuum tape has been removed from the sensor.
* * This code is "AS IS" without warranty or liability. Free to be used as long as you keep this note intact.*
* This code has been downloaded from Robojax.com
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <https://www.gnu.org/licenses/>.
Copyright (c) 2015, Majenko Technologies
All rights reserved.
Redistribution and use in source and binary forms, with or without modification,
are permitted provided that the following conditions are met:
* * Redistributions of source code must retain the above copyright notice, this
list of conditions and the following disclaimer.
* * Redistributions in binary form must reproduce the above copyright notice, this
list of conditions and the following disclaimer in the documentation and/or
other materials provided with the distribution.
* * Neither the name of Majenko Technologies nor the names of its
contributors may be used to endorse or promote products derived from
this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND
ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR
ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES
(INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON
ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS
SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
#include <Wire.h>
#include "SparkFun_VL53L1X.h"
//Optional interrupt and shutdown pins.
#define SHUTDOWN_PIN 2
#define INTERRUPT_PIN 3
SFEVL53L1X distanceSensor;
//Uncomment the following line to use the optional shutdown and interrupt pins.
//SFEVL53L1X distanceSensor(Wire, SHUTDOWN_PIN, INTERRUPT_PIN);
void setup(void)
{
Wire.begin();
Serial.begin(9600);
Serial.println("VL53L1X Qwiic Test");
if (distanceSensor.begin() == 0) //Begin returns 0 on a good init
{
Serial.println("Sensor online Robojax Says!");
}
Serial.print("I2C Address of VL53L1X:");
Serial.println(distanceSensor.getI2CAddress());
// set distance mode to Short or long
distanceSensor.setDistanceModeShort();
//distanceSensor.setDistanceModeLong();
}Recursos e referências
-
ExternoBiblioteca VL53L0X Pololu (GitHub)github.com
Arquivos📁
Nenhum arquivo disponível.