Utilizzando un sensore di distanza laser VL53L1X per misurare distanze fino a 4 metri
Il VL53L1X è un sensore di distanza laser a tempo di volo in grado di misurare distanze fino a 4 metri con alta precisione. Questo sensore comunica tramite I2C ed è versatile per varie applicazioni, come la robotica e l'automazione. In questo tutorial, esploreremo come configurare il sensore VL53L1X con un Arduino e leggere i valori di distanza in modo efficace.
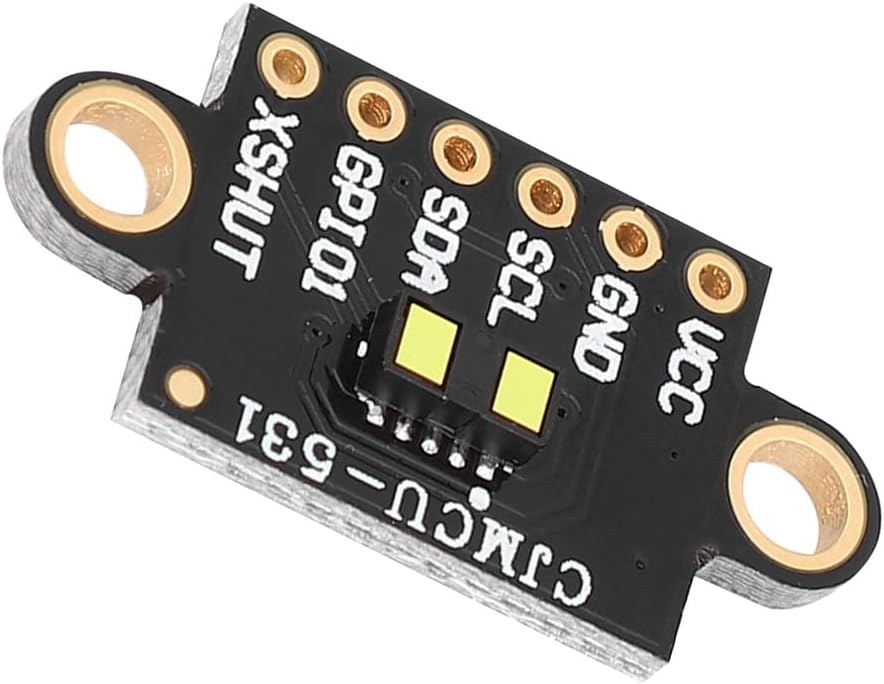
Il sensore è alimentato da 3,3V o 5V e ha più pin per la comunicazione I2C, inclusi SDA e SCL. Il sensore può misurare distanze a una frequenza di 50Hz, consentendo letture di distanza rapide. Questo tutorial ti guiderà attraverso il processo di cablaggio e il codice necessario per far funzionare il sensore senza problemi. Per ulteriori chiarimenti, puoi controllare il video (nel video a 00:00).
Hardware spiegato
Il componente principale di questo progetto è il sensore di distanza laser VL53L1X, che utilizza una tecnologia nota come tempo di volo (ToF) per misurare le distanze. Questo significa che calcola la distanza da un oggetto misurando quanto tempo impiega un impulso laser a tornare dopo aver colpito un oggetto. Il sensore presenta una comunicazione I2C, che consente un'integrazione semplice con microcontrollori come Arduino. Oltre al sensore, avrai bisogno di una scheda Arduino per l'elaborazione. L'Arduino gestirà la comunicazione con il VL53L1X e visualizzerà le distanze misurate. Il setup è semplice, poiché il sensore può essere alimentato direttamente dai pin di uscita dell'Arduino.
Dettagli del datasheet
| Produttore | STMicroelectronics |
|---|---|
| Numero di parte | VL53L1X |
| Tensione Logica/Io | 3,3 - 5 V |
| Tensione di alimentazione | 2,6 - 5,5 V |
| Corrente di uscita (per canale) | Non applicabile |
| Corrente di picco (per canale) | Non applicabile |
| indicazioni sulla frequenza PWM | Non applicabile |
| Soglie di logica d'ingresso | 0,3 × VCC (basso), 0,7 × VCC (alto) |
| Caduta di tensione / RDS(on)/ saturazione | Non applicabile |
| Limiti termici | 0 a 85 °C |
| Pacchetto | 4,9 x 2,5 x 1,6 mm |
| Note / varianti | Sensore a tempo di volo per lunghe distanze |
- Alimenta il sensore con 3,3 V o 5 V secondo necessità.
- Usa i pin I2C, SDA e SCL, per la comunicazione.
- Imposta la modalità di distanza in base alle tue esigenze (breve, media, lunga).
- Assicurati che il sensore sia calibrato per letture di distanza accurate.
- Gestisci con attenzione le condizioni di luce ambientale poiché possono influire sulle misurazioni.
Istruzioni per il cablaggio

Per collegare il sensore VL53L1X a un Arduino, connetti il pin VCC del sensore al pin 5V dell'Arduino utilizzando un filo rosso. Collega il pin di massa (GND) del sensore al GND dell'Arduino utilizzando un filo marrone. Per la comunicazione I2C, collega il pin SDA del sensore al pin A4 dell'Arduino utilizzando un filo giallo e il pin SCL al pin A5 utilizzando un filo verde. Se desideri utilizzare i pin di interruzione e spegnimento opzionali, collega il pin di spegnimento al pin digitale 2 e il pin di interruzione al pin digitale 3, ma questi non sono necessari per il funzionamento di base.
Esempi di codice e guida passo passo
Nel codice, prima includiamo le librerie necessarie e definiamo i pin per il sensore. Creiamo un'istanza del sensore con la riga:
SFEVL53L1X distanceSensor;Questa linea inizializza il sensore, permettendoci di chiamare i suoi metodi successivamente nel programma. Successivamente, impostiamo la comunicazione I2C e inizializziamo il sensore:
void setup(void)
{
Wire.begin();
Serial.begin(9600);
Serial.println("VL53L1X Qwiic Test");
if (distanceSensor.begin() == 0) //Begin returns 0 on a good init
{
Serial.println("Sensor online!");
}
}In questo estratto, iniziamo la comunicazione I2C conWire.begin()e controlla se il sensore è stato inizializzato con successo. Infine, per leggere la distanza, utilizziamo il seguente codice nel ciclo:
void loop(void)
{
int distance = distanceSensor.getDistance(); // Get distance
Serial.print("Distance: ");
Serial.println(distance);
}Questo codice recupera la misura della distanza e la stampa sul monitor seriale. Il ciclo legge continuamente la distanza, consentendo aggiornamenti in tempo reale. Per un esempio completo di codice, si prega di fare riferimento al codice completo caricato sotto l'articolo.
Dimostrazione / Cosa Aspettarsi
Quando il sensore è impostato correttamente, puoi aspettarti che fornisca misurazioni di distanza accurate fino a 4 metri. Potresti notare lievi fluttuazioni nelle letture, specialmente in condizioni di illuminazione variabili (nel video alle 10:30). È essenziale assicurarsi che il sensore sia pulito e non ostruito per ottenere risultati precisi. Se incontri letture insolite, verifica che il sensore sia alimentato correttamente e che le connessioni I2C siano sicure. Le prestazioni del sensore possono essere influenzate dall'ambiente, in particolare in presenza di luce intensa o superfici riflettenti.
Timestamp video
- 00:00 Inizio
- 00:40 Introduzione
- 03:42 Scheda Tecnica Visitata
- 06:48 Soldato Pin header
- 08:22 Cablaggi spiegati
- 09:06 Codice spiegato
- 11:53 Dimostrazione
- 16:03 Dimostrazione nel Completo Buio
Immagini

/*
* This is a code example using the VL53L1X Laser Range Sensor from STMicroelectronics
* Using a library from SparkFun (see below)
*
* Watch a video instruction for this code: https://youtu.be/Sc_iVfeocvg
* A wiring diagram is available at https://robojax.com/RJT232
* Updated by Ahmad Shamshiri on November 4, 2019
* in Ajax, Ontario, Canada. www.robojax.com
*
* Get this code and other Arduino codes from Robojax.com.
Learn Arduino step by step in a structured course with all materials, wiring diagrams and libraries
all in one place.
If you found this tutorial helpful, please support me so I can continue creating
content like this.
or make a donation using PayPal http://robojax.com/L/?id=64
*
* https://www.st.com/content/ccc/resource/technical/document/user_manual/group0/98/0d/38/38/5d/84/49/1f/DM00474730/files/DM00474730.pdf/jcr:content/translations/en.DM00474730.pdf
* https://www.st.com/resource/en/datasheet/vl53l1x.pdf
*
Reading distance from the laser-based VL53L1X
By: Nathan Seidle
Revised by: Andy England
SparkFun Electronics
Date: April 4th, 2018
License: This code is public domain but you buy me a beer if you use this and we meet someday (Beerware license).
SparkFun labored with love to create this code. Feel like supporting open-source hardware?
Buy a board from SparkFun! https://www.sparkfun.com/products/14667
This example prints the distance to an object.
Are you getting weird readings? Be sure the vacuum tape has been removed from the sensor.
* * This code is "AS IS" without warranty or liability. Free to be used as long as you keep this note intact.*
* This code has been downloaded from Robojax.com
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <https://www.gnu.org/licenses/>.
Copyright (c) 2015, Majenko Technologies
All rights reserved.
Redistribution and use in source and binary forms, with or without modification,
are permitted provided that the following conditions are met:
* * Redistributions of source code must retain the above copyright notice, this
list of conditions and the following disclaimer.
* * Redistributions in binary form must reproduce the above copyright notice, this
list of conditions and the following disclaimer in the documentation and/or
other materials provided with the distribution.
* * Neither the name of Majenko Technologies nor the names of its
contributors may be used to endorse or promote products derived from
this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND
ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR
ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES
(INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON
ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS
SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
#include <Wire.h>
#include "SparkFun_VL53L1X.h"
//Optional interrupt and shutdown pins.
#define SHUTDOWN_PIN 2
#define INTERRUPT_PIN 3
SFEVL53L1X distanceSensor;
//Uncomment the following line to use the optional shutdown and interrupt pins.
//SFEVL53L1X distanceSensor(Wire, SHUTDOWN_PIN, INTERRUPT_PIN);
void setup(void)
{
Wire.begin();
Serial.begin(9600);
Serial.println("VL53L1X Qwiic Test");
if (distanceSensor.begin() == 0) //Begin returns 0 on a good init
{
Serial.println("Sensor online Robojax Says!");
}
Serial.print("I2C Address of VL53L1X:");
Serial.println(distanceSensor.getI2CAddress());
// set distance mode to Short or long
distanceSensor.setDistanceModeShort();
//distanceSensor.setDistanceModeLong();
}Risorse e riferimenti
-
EsternoVL53L0X Libreria Pololu (GitHub)github.com
File📁
Nessun file disponibile.