
使用BTS7960模块和Arduino控制多个直流电动机
在本教程中,我们将探索如何使用BTS7960模块和Arduino控制多个直流电机。BTS7960是一款强大的电机驱动器,能够处理高电流,并通过PWM(脉宽调制)实现对电机方向和速度的精确控制。在项目结束时,您将拥有一个能够控制两个直流电机的工作设置,使它们可以顺时针和逆时针旋转。本教程将指导您完成硬件设置、接线说明以及操作电机所需的代码。为了更清楚地理解整个过程,请务必查看附带的视频(视频在00:00时)。
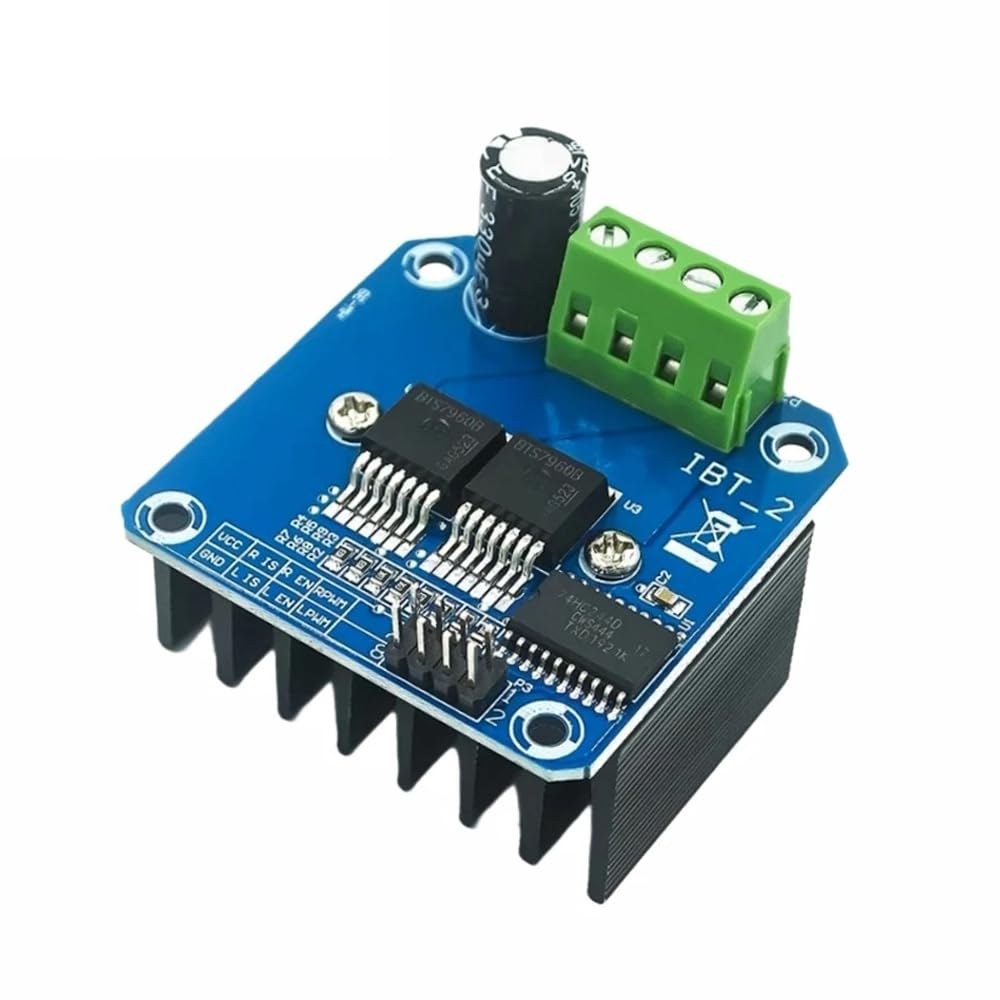
硬件解析
该项目的主要组件是BTS7960电机驱动模块。该模块包含两个H桥驱动器,可以通过切换施加到电机的电压极性来控制电机的方向。每个驱动器能够处理高达43A的电流,这使其适合高功率应用。该模块还具有针对过温和过流情况的内置保护。除了BTS7960,您还需要一个Arduino板来控制电机。Arduino向电机驱动器发送PWM信号,使您可以调整电机的速度和方向。Arduino与BTS7960模块之间的连接至关重要,因为它们决定了电机如何响应信号。
数据表详细信息
| 制造商 | 英飞凌科技 |
|---|---|
| 部件编号 | BTS7960 |
| 逻辑/IO电压 | 3.3 V到5 V |
| 供电电压 | 5-40 V |
| 输出电流(每通道) | 43 A 最大 |
| 峰值电流(每通道) | 60 A |
| PWM频率指导 | 5-25 kHz |
| 输入逻辑阈值 | 0.8 伏 (高),0.3 伏 (低) |
| 电压降 / RDS(开)/饱和度 | 16 毫欧 |
| 热限制 | 最大150 °C |
| 包裹 | TO-263 |
| 备注 / 变体 | 双H桥配置 |
- 确保在高电流下运行时有适当的散热。
- 使用适当的线规进行电源连接。
- 仔细检查Arduino与BTS7960之间的引脚映射。
- 实施电流限制以防止模块损坏。
- 在电源附近使用解耦电容以提高稳定性。
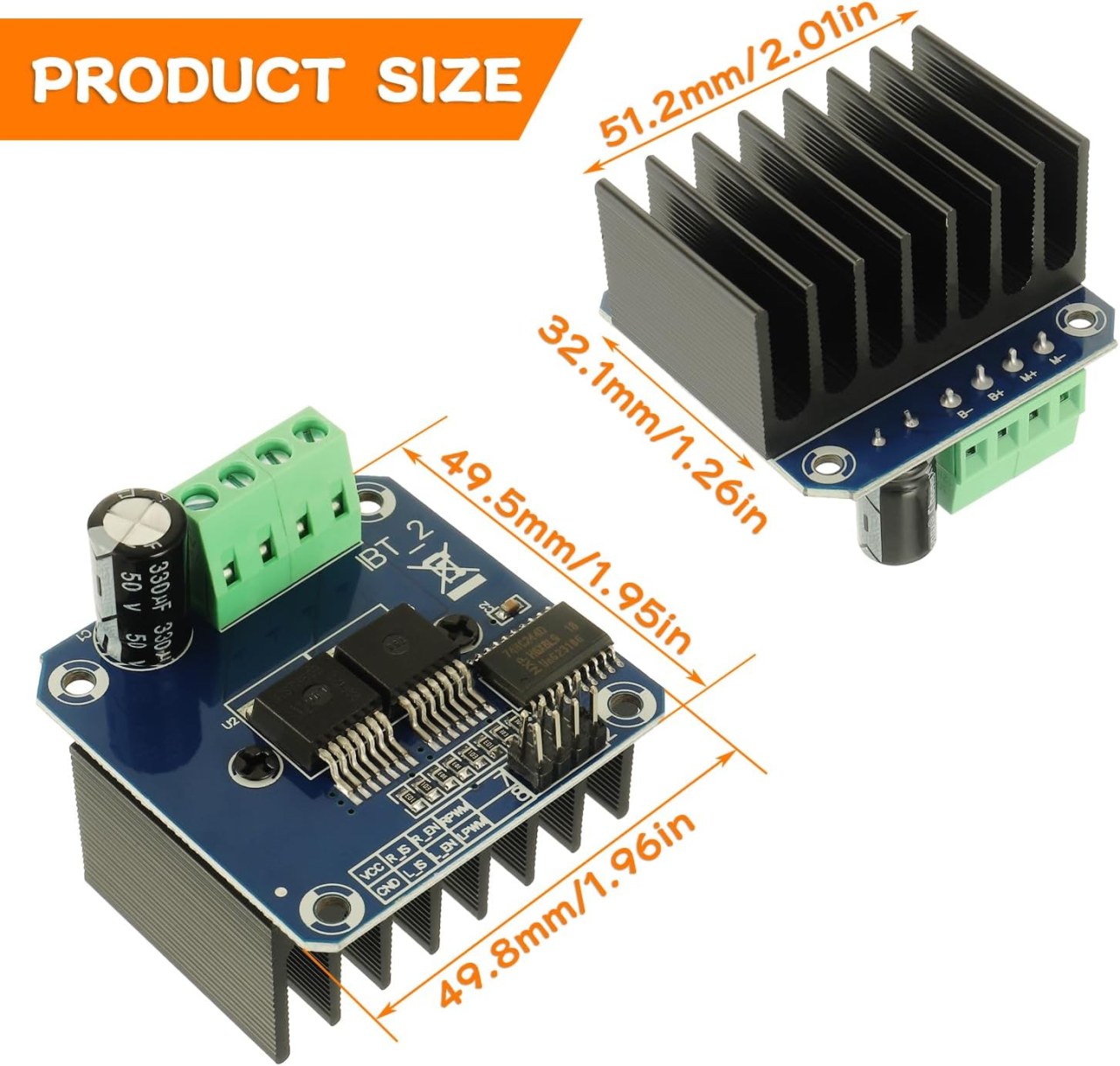
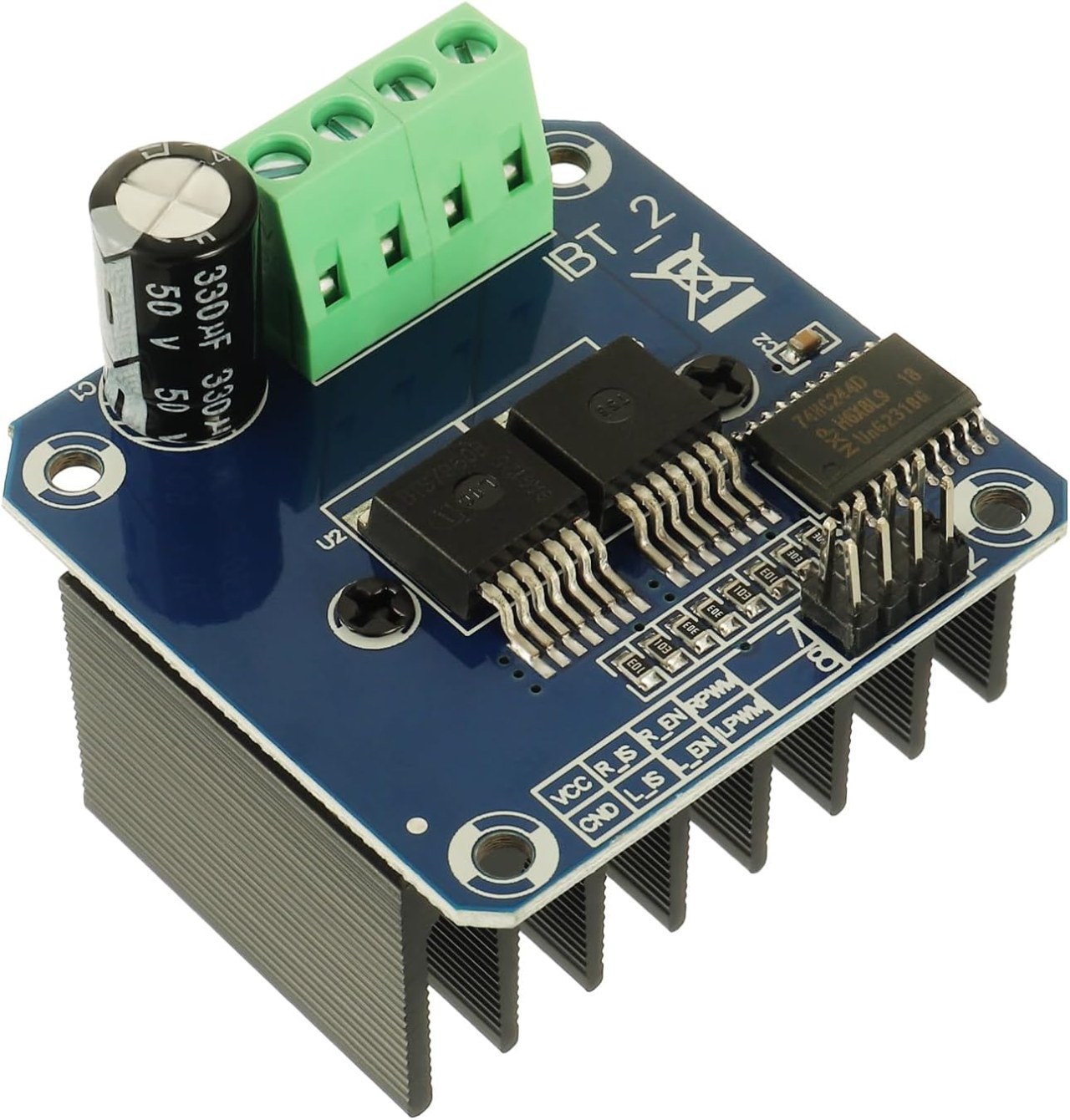
接线说明

要将BTS7960模块接线到Arduino,请仔细按照以下连接方式进行操作:1. **电源连接**:将电源的正极连接到BTS7960模块的B+端子,将负极连接到B-端子。确保电源的电压与您的电机要求相符。2. **电机连接**:将电机电线连接到模块的M+和M-端子。这将使模块能够控制电机。3. **Arduino引脚**:将Arduino上的以下引脚连接到BTS7960模块:- 引脚3(RPWM)连接到模块的RPWM引脚。- 引脚4(R_EN)连接到模块的R_EN引脚。- 引脚5(R_IS)连接到模块的R_IS引脚。- 引脚6(LPWM)连接到模块的LPWM引脚。- 引脚7(L_EN)连接到模块的L_EN引脚。- 引脚8(L_IS)连接到模块的L_IS引脚。4. **接地连接**:将Arduino的接地引脚连接到BTS7960模块的接地引脚,以确保信号的共同参考。确保所有连接牢固,以防止操作过程中出现意外行为。
安装所需库
安装该robojax_BTS7960_motor_driver_library在Arduino IDE中,首先从提供的链接下载库的ZIP文件。保存文件后,打开Arduino IDE并导航到草图 > 包含库 > 添加 .ZIP 库...在文件选择对话框中,浏览到下载的 ZIP 文件,选择该文件,然后点击“打开”。然后,IDE 将安装该库。您可以通过检查来确认安装是否成功文件 > 示例菜单中应该出现一个名为“Robojax BTS7960电机驱动库”的新类别。您现在可以在代码中包含库头文件。#include <RobojaxBTS7960.h>.
代码示例与演练
以下代码片段演示了如何使用BTS7960模块设置和控制电机。初始设置定义了连接到电机的引脚并初始化电机对象:
// pins for motor 1
#define RPWM_1 3
#define R_EN_1 4
#define R_IS_1 5
#define LPWM_1 6
#define L_EN_1 7
#define L_IS_1 8
// pins for motor 2
#define RPWM_2 9
#define R_EN_2 10
#define R_IS_2 12
#define LPWM_2 11
#define L_EN_2 A0
#define L_IS_2 A1
#include
RobojaxBTS7960 motor1(R_EN_1, RPWM_1, R_IS_1, L_EN_1, LPWM_1, L_IS_1, debug);
RobojaxBTS7960 motor2(R_EN_2, RPWM_2, R_IS_2, L_EN_2, LPWM_2, L_IS_2, debug);
这段代码设置了引脚定义,并为两个电机创建了`RobojaxBTS7960`类的实例。`setup()`函数初始化电机和串口监视器:
void setup() {
Serial.begin(9600); // setup Serial Monitor
motor1.begin();
motor2.begin();
}
这里,`motor.begin()` 方法为每个电机准备操作,使您可以在 `loop()` 函数中控制它们。在 `loop()` 函数中,您可以使用如下命令控制电机:
void loop() {
motor1.rotate(100, CW); // run motor 1 at 100% speed CW
delay(5000); // run for 5 seconds
motor1.stop(); // stop motor 1
delay(3000); // stop for 3 seconds
motor2.rotate(100, CCW); // run motor 2 at 100% speed CCW
delay(5000); // run for 5 seconds
motor2.stop(); // stop motor 2
delay(3000); // stop for 3 seconds
}
本节展示了如何使电机双向旋转和控制其速度。完整代码已附在文章下方供您参考。
演示 / 期待内容
在完成接线和上传代码后,您应该观察到电动机分别以顺时针和逆时针方向旋转。代码将使每个电动机以满速运行五秒,然后停止三秒,并重复该过程。注意任何潜在的问题,例如连接反向或电源不足。如果您遇到问题,请仔细检查您的接线,并确保电源充足(视频时间为00:00)。
视频时间戳
- 00:00 开始
- 00:48 硬件解释
- 04:06 数据表已查看
- 07:07 接线讲解
- 09:00 代码解释
- 14:33 示范
- 16:47 最大电流测试
- 19:25 热成像
- 19:27 不同的代码测试
图像

This code has not been parsed yet. Please return to the admin panel to parse it.资源与参考
-
外部BTS7960 在意大利亚马逊上amzn.to
-
外部BTS7960 在西班牙亚马逊amzn.to
-
外部BTS7960 日本亚马逊amzn.to
-
外部BTS7960模块数据手册(PDF)handsontec.com
-
外部BTS7960,德国亚马逊amzn.to
-
外部从亚马逊购买BTS7960amzn.to
-
外部从加拿大亚马逊购买BTS7960amzn.to
-
外部在法国亚马逊上出售的BTS7960amzn.to
-
外部购买BTS7960,亚马逊英国amzn.to
文件📁
Arduino 库(zip 格式)
-
robojax_BTS7960电机驱动库
robojax_BTS7960_motor_driver_library.zip0.10 MB
数据手册 (pdf)
-
BTS7960_数据表
BTS7960_datasheet.pdf0.45 MB
Fritzing 文件
-
BTS7960驱动器
BTS7960_driver.fzpz0.01 MB
















