Controlando Múltiplos Motores DC Usando um Módulo BTS7960 com Arduino
Neste tutorial, vamos explorar como controlar múltiplos motores DC usando o módulo BTS7960 com um Arduino. O BTS7960 é um poderoso driver de motor capaz de lidar com altas correntes e permite o controle preciso da direção e velocidade do motor através de PWM (Modulação por Largura de Pulso). Ao final deste projeto, você terá uma configuração funcional que pode controlar dois motores DC, girando-os em ambas as direções, horário e anti-horário. Este tutorial o guiará através da configuração de hardware, instruções de cabeamento e o código necessário para operar os motores. Para uma compreensão mais clara de todo o processo, certifique-se de conferir o vídeo acompanhante (no vídeo em 00:00).
Hardware Explicado
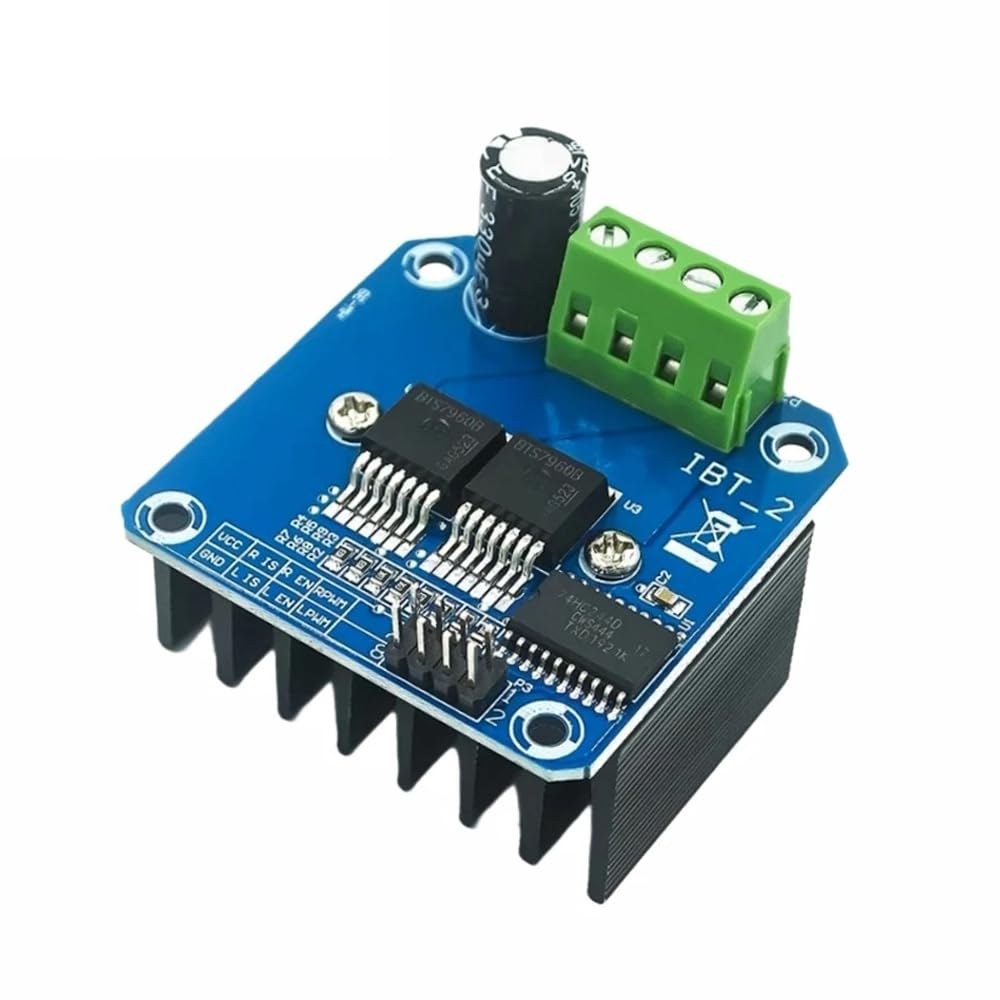
O componente principal deste projeto é o módulo driver de motor BTS7960. Este módulo inclui dois drivers em ponte H que podem controlar a direção dos motores mudando a polaridade da tensão aplicada ao motor. Cada driver pode suportar até 43A de corrente, o que o torna adequado para aplicações de alta potência. O módulo também possui proteção embutida contra situações de sobretemperatura e sobrecorrente. Além do BTS7960, você precisará de uma placa Arduino para controlar os motores. O Arduino envia sinais PWM para o driver do motor, permitindo que você ajuste a velocidade e a direção dos motores. As conexões entre o Arduino e o módulo BTS7960 são cruciais, pois ditam como os motores responderão aos sinais.
Detalhes da Ficha Técnica
| Fabricante | Infineon Technologies |
|---|---|
| Número da peça | BTS7960 |
| Tensão de lógica/IO | 3,3 V a 5 V |
| Tensão de alimentação | 5-40 V |
| Corrente de saída (por canal) | 43 A max |
| Corrente de pico (por canal) | 60 A |
| Orientação sobre a frequência PWM | 5-25 kHz |
| Limiares de lógica de entrada | 0,8 V (alto), 0,3 V (baixo) |
| Queda de tensão / RDS(on)saturação | 16 mΩ |
| Limites térmicos | 150 °C max |
| Pacote | TO-263 |
| Notas / variantes | Configuração de ponte H dupla |
- Certifique-se de um dissipador de calor adequado ao operar em altas correntes.
- Use o cumprimento de fio apropriado para conexões de energia.
- Verifique novamente as conexões dos pinos entre o Arduino e o BTS7960.
- Implemente a limitação de corrente para evitar danos ao módulo.
- Use capacitores de desacoplamento próximos à fonte de alimentação para estabilidade.
Instruções de fiação

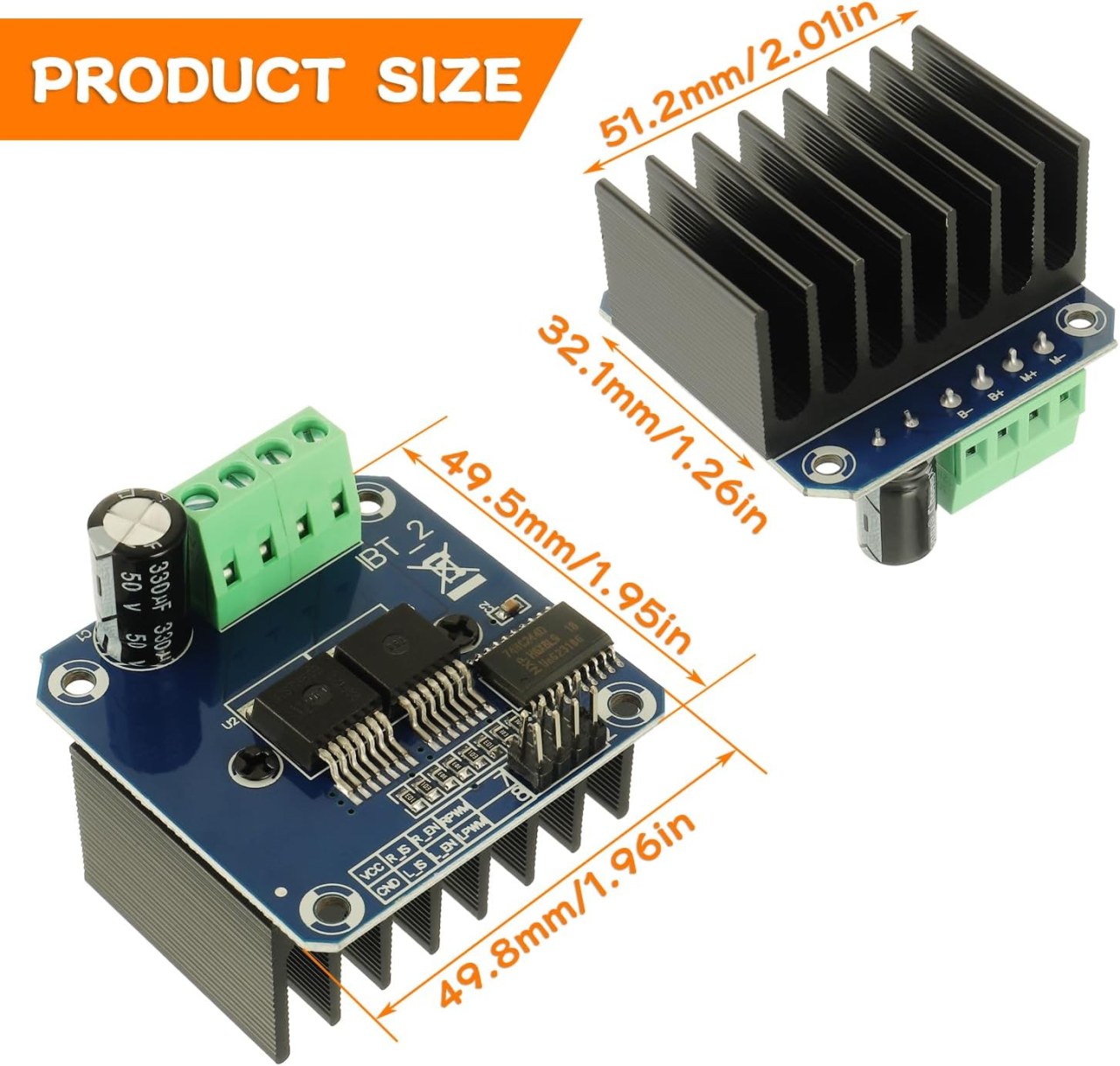
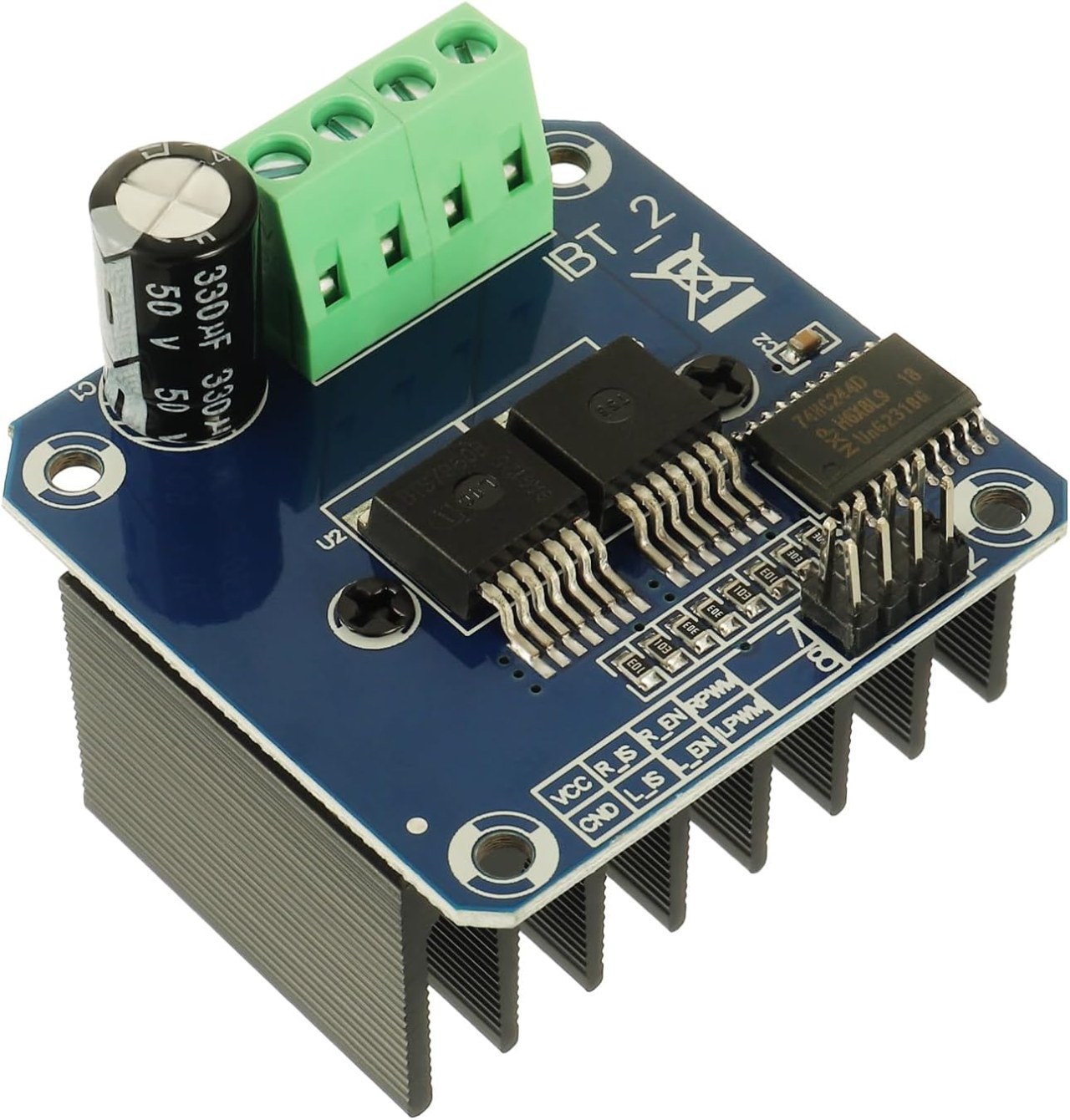
Para conectar o módulo BTS7960 ao Arduino, siga estas conexões cuidadosamente: 1. **Conexões de Alimentação**: Conecte o terminal positivo da sua fonte de alimentação ao terminal B+ no módulo BTS7960, e o terminal negativo ao terminal B-. Certifique-se de que a fonte de alimentação corresponda aos requisitos de voltagem dos seus motores. 2. **Conexões do Motor**: Conecte os fios do motor aos terminais M+ e M- no módulo. Isso permitirá que o módulo controle o motor. 3. **Pinos do Arduino**: Conecte os seguintes pinos no Arduino ao módulo BTS7960: - Pino 3 (RPWM) ao pino RPWM no módulo. - Pino 4 (R_EN) ao pino R_EN no módulo. - Pino 5 (R_IS) ao pino R_IS no módulo. - Pino 6 (LPWM) ao pino LPWM no módulo. - Pino 7 (L_EN) ao pino L_EN no módulo. - Pino 8 (L_IS) ao pino L_IS no módulo. 4. **Conexões de Terra**: Conecte o pino de terra do Arduino ao pino de terra no módulo BTS7960 para garantir uma referência comum para os sinais. Certifique-se de que todas as conexões estão seguras para evitar qualquer comportamento inesperado durante a operação.
Instale a biblioteca necessária
Para instalar orobojax_BTS7960_motor_driver_libraryno IDE Arduino, primeiro baixe o arquivo ZIP da biblioteca no link fornecido. Com o arquivo salvo, abra seu IDE Arduino e navegue atéSketch > Incluir Biblioteca > Adicionar Biblioteca .ZIP...No arquivo de seleção, navegue até o arquivo ZIP baixado, selecione-o e clique em "Abrir". O IDE então instalará a biblioteca. Você pode confirmar uma instalação bem-sucedida verificando oArquivo > Exemplosmenu, onde uma nova categoria chamada "Biblioteca de Driver de Motor Robojax BTS7960" deve aparecer. Agora você pode incluir o cabeçalho da biblioteca no seu código com#include <RobojaxBTS7960.h>.
Exemplos de Código e Tutorial
Os trechos de código a seguir demonstram como configurar e controlar os motores usando o módulo BTS7960. A configuração inicial define os pinos conectados aos motores e inicializa os objetos dos motores:
// pins for motor 1
#define RPWM_1 3
#define R_EN_1 4
#define R_IS_1 5
#define LPWM_1 6
#define L_EN_1 7
#define L_IS_1 8
// pins for motor 2
#define RPWM_2 9
#define R_EN_2 10
#define R_IS_2 12
#define LPWM_2 11
#define L_EN_2 A0
#define L_IS_2 A1
#include
RobojaxBTS7960 motor1(R_EN_1, RPWM_1, R_IS_1, L_EN_1, LPWM_1, L_IS_1, debug);
RobojaxBTS7960 motor2(R_EN_2, RPWM_2, R_IS_2, L_EN_2, LPWM_2, L_IS_2, debug);
Esta seção do código configura as definições dos pinos e cria instâncias da classe `RobojaxBTS7960` para ambos os motores. A função `setup()` inicializa os motores e o monitor serial:
void setup() {
Serial.begin(9600); // setup Serial Monitor
motor1.begin();
motor2.begin();
}
Aqui, o método `motor.begin()` prepara cada motor para operação, permitindo que você os controle na função `loop()`. Na função `loop()`, você pode controlar os motores com comandos como este:
void loop() {
motor1.rotate(100, CW); // run motor 1 at 100% speed CW
delay(5000); // run for 5 seconds
motor1.stop(); // stop motor 1
delay(3000); // stop for 3 seconds
motor2.rotate(100, CCW); // run motor 2 at 100% speed CCW
delay(5000); // run for 5 seconds
motor2.stop(); // stop motor 2
delay(3000); // stop for 3 seconds
}
Esta seção mostra como girar os motores em ambas as direções e controlar sua velocidade. O código completo está carregado abaixo do artigo para sua referência.
Demonstração / O que Esperar
Após concluir a fiação e carregar o código, você deve observar os motores girando em ambas as direções, horário e anti-horário. O código fará cada motor funcionar em velocidade total por cinco segundos, parar por três segundos e repetir o processo. Fique atento a quaisquer problemas potenciais, como conexões invertidas ou fonte de energia insuficiente. Se você encontrar problemas, verifique novamente sua fiação e garanta que a fonte de energia seja adequada (no vídeo em 00:00).
Marcas de Tempo do Vídeo
- 00:00 Início
- 00:48 Hardware Explicado
- 04:06 Ficha técnica visualizada
- 07:07 Fiação Explicada
- 09:00 Código explicado
- 14:33 Demonstração
- 16:47 Teste de corrente máxima
- 19:25 Imagem térmica
- 19:27 Teste de código diferente
Imagens

++
/*
* This is the Arduino code for the BTS7960 DC motor driver.
Using this code, you can control more than one motor to rotate in both directions: clockwise (CW)
and counter-clockwise (CCW).
📚⬇️ Download and resource page for this video https://robojax.com/RJT169
📚⬇️ Download and resource page https://robojax.com/RJT170
Written by Ahmad Shamshiri for Robojax.com on
July 16, 2020 in Ajax, Ontario, Canada.
Watch video instructions for this code: https://youtu.be/PUL5DZ9TA2o
BTS7960B
If you found this tutorial helpful, please support me so I can continue creating
content like this. You can support me on Patreon: http://robojax.com/L/?id=63
or make a donation using PayPal: http://robojax.com/L/?id=64
* This code has been downloaded from Robojax.com
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <https://www.gnu.org/licenses/>.
*/
// pins for motor 1
#define RPWM_1 3 // define pin 3 for RPWM pin (output)
#define R_EN_1 4 // define pin 2 for R_EN pin (input)
#define R_IS_1 5 // define pin 5 for R_IS pin (output)
#define LPWM_1 6 // define pin 6 for LPWM pin (output)
#define L_EN_1 7 // define pin 7 for L_EN pin (input)
#define L_IS_1 8 // define pin 8 for L_IS pin (output)
// motor 1 pins end here
// pins for motor 2
#define RPWM_2 9 // define pin 9 for RPWM pin (output)
#define R_EN_2 10 // define pin 10 for R_EN pin (input)
#define R_IS_2 12 // define pin 12 for R_IS pin (output)
#define LPWM_2 11 // define pin 11 for LPWM pin (output)
#define L_EN_2 A0 // define pin 7 for L_EN pin (input)
#define L_IS_2 A1 // define pin 8 for L_IS pin (output)
// motor 2 pins end here
#define CW 1 //
#define CCW 0 //
#define debug 1 //
#include <RobojaxBTS7960.h>
RobojaxBTS7960 motor1(R_EN_1,RPWM_1,R_IS_1, L_EN_1,LPWM_1,L_IS_1,debug);//define motor 1 object
RobojaxBTS7960 motor2(R_EN_2,RPWM_2,R_IS_2, L_EN_2,LPWM_2,L_IS_2,debug);//define motor 2 object and the same way for other motors
void setup() {
// BTS7960 Motor Control Code by Robojax.com 20190622
Serial.begin(9600);// setup Serial Monitor to display information
motor1.begin();
motor2.begin();
// BTS7960 Motor Control Code by Robojax.com 20190622
}
void loop() {
// BTS7960 Motor Control Code by Robojax.com 20190622
motor1.rotate(100,CW);// run motor 1 with 100% speed in CW direction
delay(5000);//run for 5 seconds
motor1.stop();// stop the motor 1
delay(3000);// stop for 3 seconds
motor1.rotate(100,CCW);// run motor 1 at 100% speed in CCW direction
delay(5000);// run for 5 seconds
motor1.stop();// stop the motor 1
delay(3000); // stop for 3 seconds
motor2.rotate(100,CW);// run motor 2 with 100% speed in CW direction
delay(5000);//run for 5 seconds
motor2.stop();// stop the motor 2
delay(3000);// stop for 3 seconds
motor2.rotate(100,CCW);// run motor 2 at 100% speed in CCW direction
delay(5000);// run for 5 seconds
motor2.stop();// stop the motor 2
delay(3000); // stop for 3 seconds
// slowly speed up the motor 1 from 0 to 100% speed
for(int i=0; i<=100; i++){
motor1.rotate(i,CCW);
delay(50);
}
// slow down the motor 2 from 100% to 0
for(int i=100; i>0; i--){
motor2.rotate(i,CCW);
delay(50);
}
motor2.stop();// stop motor 2
delay(3000); // stop for 3 seconds
// BTS7960 more than 1 Motor Control Code by Robojax.com 20190622
}// loop endsRecursos e referências
-
ExternoBTS7960 Amazon Japãoamzn.to
-
ExternoBTS7960 na Amazon Espanhaamzn.to
-
ExternoBTS7960 na Amazon Françaamzn.to
-
ExternoBTS7960 na Amazon Itáliaamzn.to
-
ExternoBTS7960, Amazon Alemanhaamzn.to
-
ExternoCompre BTS7960 na Amazonamzn.to
-
ExternoCompre BTS7960 na Amazon Canadáamzn.to
-
Externo
-
ExternoFicha técnica do módulo BTS7960 (PDF)handsontec.com
Arquivos📁
Bibliotecas do Arduino (zip)
-
robojax_BTS7960_biblioteca_de_controladores_de_motor
robojax_BTS7960_motor_driver_library.zip0.10 MB
Folha de dados (pdf)
-
BTS7960_datasheet
BTS7960_datasheet.pdf0.45 MB
Arquivo Fritzing
-
BTS7960_driver
BTS7960_driver.fzpz0.01 MB