将VL53L0X激光测距仪与Arduino一起使用
在本教程中,我们将探讨如何将VL53L0X激光测距仪与 Arduino 一起使用。该设备允许您使用激光准确测量距离,使其成为机器人和自动化等各种应用的理想选择。在本教程结束时,您将拥有一个功能设置,可以测量距离并将其显示在串行监视器中。

对于我们的项目,我们将使用 Adafruit VL53L0X 库,它简化了与传感器接口的过程。该库提供了初始化传感器、读取测量值和处理可能出现的任何错误所需的功能。您可以参考视频以获取有关设置的视觉指南(在视频 02:15 处)。
硬件解释
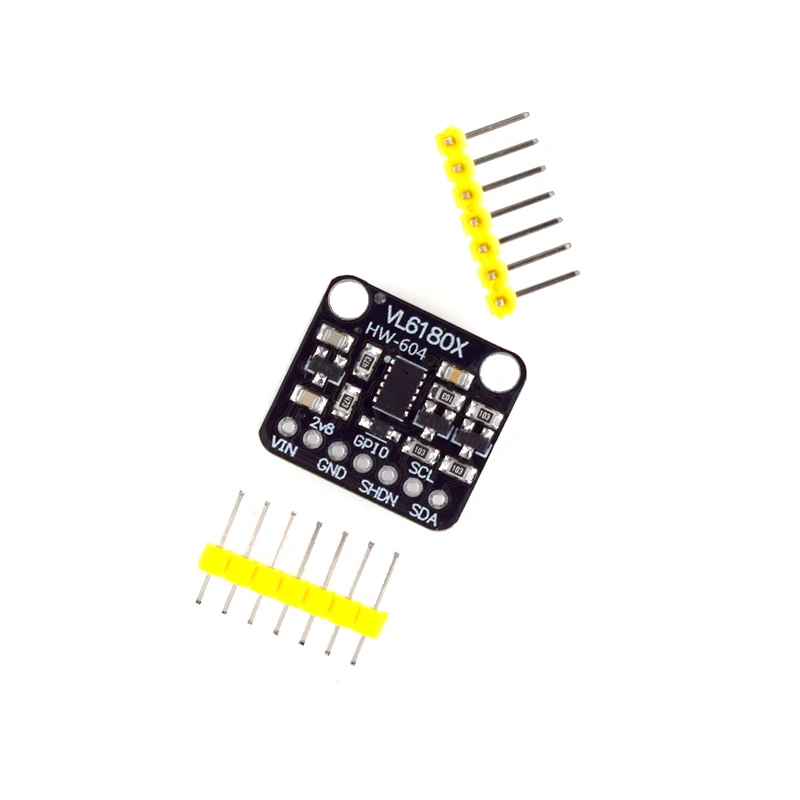
该项目的主要组件包括VL53L0X激光测距仪和Arduino板。VL53L0X是一种飞行时间传感器,它使用激光高精度测量长达 2 米的距离。它通过 I2C 协议运行,可以轻松与 Arduino 通信。
Arduino板充当处理来自VL53L0X的数据的微控制器。它向传感器发送命令并接收距离测量值,然后可以在其他应用中显示或使用。正确的接线对于确保传感器的准确读数至关重要。
数据表详细信息
| 制造者 | 意法半导体 |
|---|---|
| 部件号 | VL53L0X |
| 工作电压 | 2.6 V 至 3.5 V |
| 范围 | 30 毫米至 2000 毫米 |
| 准确性 | 典型值 ±3% |
| 接口 | 工业2C |
| 温度范围 | -40 °C 至 +85 °C |
| 电流消耗 | <1 mA(待机),20 mA(有源) |
| 包 | VFLGA-8 型 |
- 确保传感器正确供电(2.6 V 至 3.5 V)。
- 保持正确的 I2C 地址设置以避免冲突。
- 保持传感器清洁,以便进行准确的距离测量。
- 如果需要,在I2C线路上使用适当的上拉电阻。
- 避免阳光直射传感器以获得可靠的读数。
接线说明

要将VL53L0X传感器连接到 Arduino,请将传感器的 VCC 引脚连接到 Arduino 上的 5V 引脚。GND 引脚应连接到 Arduino 的接地 (GND)。对于 I2C 通信,将 VL53L0X 的 SDA 引脚连接到 Arduino 上的 A4 引脚,并将 SCL 引脚连接到 A5 引脚。如果您使用的是不同的 Arduino 型号,请参阅该板的特定 SDA 和 SCL 引脚分配。
例如,在 Arduino Mega 上,您可以将 SDA 连接到引脚 20,将 SCL 连接到引脚 21。确保所有连接都是安全的,以避免通信问题。如果传感器没有响应,请仔细检查接线并确保 Arduino 已正确供电。
代码示例和演练
下面是初始化VL53L0X传感器的设置函数的片段:
void setup() {
Serial.begin(9600);
while (! Serial) {
delay(1);
}
Serial.println("Robojax Test");
if (!lox.begin()) {
Serial.println(F("Failed to boot VL53L0X"));
while(1);
}
}此代码初始化串行通信并尝试启动VL53L0X传感器。如果传感器无法启动,它将打印错误消息并停止程序。
接下来,这是来自读取距离测量值的循环函数的片段:
void loop() {
VL53L0X_RangingMeasurementData_t measure;
lox.rangingTest(&measure, false);
if (measure.RangeStatus != 4) {
Serial.print("Distance (mm): "); Serial.println(measure.RangeMilliMeter);
} else {
Serial.println(" out of range ");
}
delay(100);
}该模块连续读取传感器的距离测量值并将其打印到串行监视器。如果测量超出范围,则相应地指示这一点。
演示/期待什么
运行程序时,您应该会在串行监视器中看到距离测量值。读数应每 100 毫秒更新一次。如果传感器指向物体,它将以毫米为单位显示距离。如果对象超出范围,它也会指示这一点。确保在其指定范围内测试传感器以获得最佳结果(在 10:00 的视频中)。
视频时间戳
- 00:00-介绍
- 02:15- 接线设置
- 05:30- 代码说明
- 10:00-示范
图像
This code has not been parsed yet. Please return to the admin panel to parse it.资源与参考
-
外部VL53L0X 数据表 (PDF)st.com
文件📁
没有可用的文件。