
چگونه از آردوینو به عنوان کنترل از راه دور تلویزیون استفاده کنیم
این راهنما نشان میدهد که چگونه یک آردوینو را به یک کنترل از راه دور یونیورسال برای تلویزیون، پخش کننده بلورای شما یا سایر دستگاههای کنترل شده با مادون قرمز تبدیل کنید. شما یاد خواهید گرفت که سیگنالها را از هر کنترل از راه دور رمزگشایی کنید و سپس آن کدها را با استفاده از آردوینو و یک LED مادون قرمز منتقل کنید. این امکان را برای شما فراهم میکند که به دنیای امکانات اتوماسیون دست پیدا کنید، از کنترل ساده روشن/خاموش تا توالیهای پیچیده شامل چندین دستگاه.

اینجا چند ایده پروژه برای شروع به شما ارائه میشود:
- یک سیستم زمانبندی شده روشن/خاموش تلویزیون ایجاد کنید.
- کنترل تلویزیون خود را به یک سیستم خانه هوشمند ادغام کنید.
- یک کنترل از راه دور سفارشی با عملکردهای منحصر به فرد بسازید.
- سیستم سرگرمی خود را با دستورات صوتی از طریق یک دستیار صوتی مبتنی بر آردوینو کنترل کنید.
سختافزار/قطعات
- آردوینو یونو (یا برد سازگار)
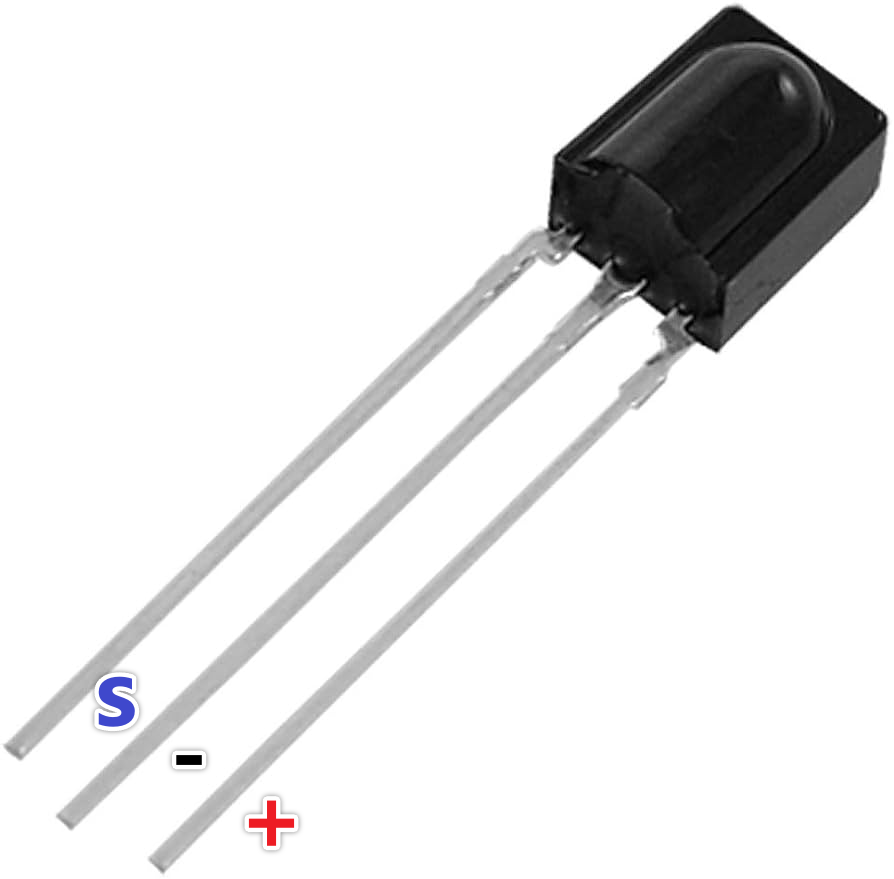
- ماجیول گیرنده مادون قرمز (به عنوان مثال، TSOP1738، VS1838B)
- LED مادون قرمز (IR) (به عنوان مثال، طول موج 940 نانومتر)
- مقاوم (۲۷۰-۳۳۰ اهم برای LED مادون قرمز)
- سیمهای رابط
- بورد آزمایش (اختیاری)
راهنمای سیمکشی
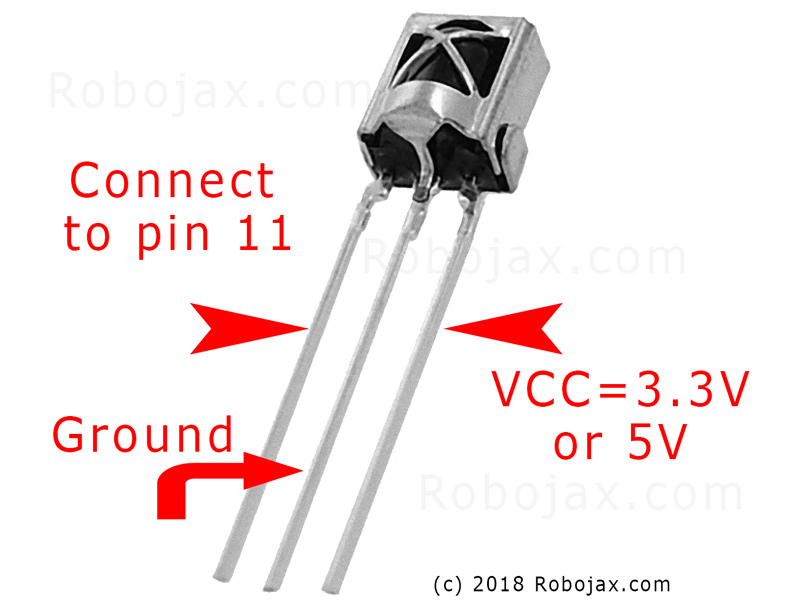
ماجیول گیرنده IR را به شرح زیر متصل کنید (در ویدئو در ۰۲:۴۵):
- VCC به ۵ ولت آردوینو
- GND به GND آردوینو
- پایه سیگنال به پایه ۱۱ آردوینو (قابل تغییر در شِفر (کود))
LED IR را به صورت زیر وصل کنید (در ویدیو در ۰۲:۰۷):
- یک پایه LED به پایه 3 آردوینو (از طریق یک مقاومت 270-330 اهم)
- پایه دیگر LED به GND آردوینو
مقاومت جریان را به LED مادون قرمز محدود میکند و از آسیب آن محافظت میکند (در ویدیو در 03:37).
توضیحات شِفر (کود)
ابتدا کتابخانه IRremote را نصب کنید (در ویدیو در 04:16). این کتابخانه جزئیات ارسال و دریافت سیگنالهای مادون قرمز را مدیریت میکند. شما میتوانید آن را در مدیر کتابخانه آردوینو پیدا کنید.
کدهای ارائه شده برای مرجع هستند. کتابخانه IRremote شامل شِفر (کود) نمونه برای دریافت و ارسال سیگنالهای IR میباشد. نمونهها را میتوان در IDE آردوینو پیدا کرد: فایل > نمونهها > IRremote.
شِفر (کود) دریافت
این قطعه شِفر (کود) دریافتکننده را بر روی پایه 11 تنظیم میکند (در ویدیو در 04:50). تغییر دهیدRECV_PINاگر شما از پایه متفاوتی استفاده میکنید.
#include
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
ارسال شِفر (کود)
این شِفر (کود) شِفر (کود) خام IR ضبط شده را ارسال میکند.rawآرایه زمانبندی سیگنالها را ذخیره میکند و38فرکانس (به کلوهرتز) را نشان میدهد. شما باید دادههای نمونه را با کدی که از کنترل از راه دور خود ضبط کردهاید جایگزین کنید (در ویدیو در 05:26).
irsend.sendRaw(raw, sizeof(raw) / sizeof(raw[0]), 38);
متن:sizeof(raw) / sizeof(raw[0])تعداد عناصر موجود در را محاسبه میکندrawآرایه (در ویدیو در ساعت ۰۶:۱۸).
پروژه/نمایش زنده
این ویدئو نحوه ضبط شِفر (کود) دکمه پاور از ریموت تلویزیون سامسونگ و سپس استفاده از آردوینو برای روشن و خاموش کردن تلویزیون (در ویدئو در 08:29) را نشان میدهد. این فرآیند شامل ضبط شِفر (کود) با استفاده از اسکریپت دریافت و سپس چسباندن آن شِفر (کود) به اسکریپت ارسال است. این نمایش نشان میدهد که چگونه آردوینو با موفقیت ریموت اصلی را شبیهسازی میکند.
فصلها
- [00:00] مقدمه و مرور کلی پروژه
- [00:41] درک کنترل از راه دور مادون قرمز
- قطعات سختافزاری و سیمکشی
- [04:16] نصب کتابخانه IRremote
- ارسال سیگنالهای IR با آردوینو
- [06:46] آزمایش انتقال مادون قرمز
- [08:29] نمایش زنده با تلویزیون سامسونگ
- [09:27] گسترش پروژه و ایدههای بیشتر
تصاویر


#include <IRremote.h>
// Sketch from:
//https://gist.github.com/probonopd/5793692#file-sendandreceive-ino
// http://www.pjrc.com/teensy/td_libs_IRremote.html
// If one keypress results in multiple codes being output, then
// change in IRremoteInt.h:
// #define _GAP 50000
// Provided by Robojax.com on August 4, 2018
// Watch video instructions for this code:https://youtu.be/xA66hXYRx9I
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
// Compare two tick values, returning 0 if newval is shorter,
// 1 if newval is equal, and 2 if newval is longer.
// Use a tolerance of 20%
int compare(unsigned int oldval, unsigned int newval) {
if (newval < oldval * .8) {
return 0;
}
else if (oldval < newval * .8) {
return 2;
}
else {
return 1;
}
}
// Use FNV hash algorithm: http://isthe.com/chongo/tech/comp/fnv/#FNV-param
#define FNV_PRIME_32 16777619
#define FNV_BASIS_32 2166136261
/* Converts the raw code values into a 32-bit hash code.
* Hopefully this code is unique for each button.
*/
unsigned long decodeHash(decode_results *results) {
unsigned long hash = FNV_BASIS_32;
for (int i = 1; i+2 < results->rawlen; i++) {
int value = compare(results->rawbuf[i], results->rawbuf[i+2]);
// Add value into the hash
hash = (hash * FNV_PRIME_32) ^ value;
}
return hash;
}
void setup()
{
Serial.begin(9600);
Serial.println("Robojax IR Capture");
irrecv.enableIRIn(); // Start the receiver
}
int c = 1;
void dump(decode_results *results) {
int count = results->rawlen;
Serial.println(c);
c++;
Serial.println("Hash: ");
unsigned long hash = decodeHash(results);
Serial.println(hash, HEX);
Serial.println("For IR Scope/IrScrutinizer: ");
for (int i = 1; i < count; i++) {
if ((i % 2) == 1) {
Serial.print("+");
Serial.print(results->rawbuf[i]*USECPERTICK, DEC);
}
else {
Serial.print(-(int)results->rawbuf[i]*USECPERTICK, DEC);
}
Serial.print(" ");
}
Serial.println("-127976");
Serial.println("For Arduino sketch: ");
Serial.print("unsigned int raw[");
Serial.print(count, DEC);
Serial.print("] = {");
for (int i = 1; i < count; i++) {
if ((i % 2) == 1) {
Serial.print(results->rawbuf[i]*USECPERTICK, DEC);
}
else {
Serial.print((int)results->rawbuf[i]*USECPERTICK, DEC);
}
Serial.print(",");
}
Serial.print("};");
Serial.println("");
Serial.print("irsend.sendRaw(raw,");
Serial.print(count, DEC);
Serial.print(",38);");
Serial.println("");
Serial.println("");
}
#include <avr/interrupt.h>
#include <stdio.h>
#include <avr/pgmspace.h>
#include <stdint.h>
#include <avr/io.h>
#define IR_PORT PORTB
// #define IR_PIN PINB
// #define IR_DDR DDRB
// #define IR_BV _BV(1)
#define IR_OCR OCR1A
#define IR_TCCRnA TCCR1A
#define IR_TCCRnB TCCR1B
#define IR_TCNTn TCNT1
#define IR_TIFRn TIFR1
#define IR_TIMSKn TIMSK1
#define IR_TOIEn TOIE1
#define IR_ICRn ICR1
#define IR_OCRn OCR1A
#define IR_COMn0 COM1A0
#define IR_COMn1 COM1A1
#define PRONTO_IR_SOURCE 0 // Pronto code byte 0
#define PRONTO_FREQ_CODE 1 // Pronto code byte 1
#define PRONTO_SEQUENCE1_LENGTH 2 // Pronto code byte 2
#define PRONTO_SEQUENCE2_LENGTH 3 // Pronto code byte 3
#define PRONTO_CODE_START 4 // Pronto code byte 4
static const uint16_t *ir_code = NULL;
static uint16_t ir_cycle_count = 0;
static uint32_t ir_total_cycle_count = 0;
static uint8_t ir_seq_index = 0;
static uint8_t ir_led_state = 0;
void ir_on()
{
IR_TCCRnA |= (1<<IR_COMn1) + (1<<IR_COMn0);
ir_led_state = 1;
}
void ir_off()
{
IR_TCCRnA &= ((~(1<<IR_COMn1)) & (~(1<<IR_COMn0)) );
ir_led_state = 0;
}
void ir_toggle()
{
if (ir_led_state)
ir_off();
else
ir_on();
}
void ir_start(uint16_t *code)
{
ir_code = code;
// IR_PORT &= ~IR_BV; // Turn output off (atmega328 only)
digitalWrite(9,LOW); // Turn output off
// IR_DDR |= IR_BV; // Set it as output (atmega328 only)
pinMode(9,OUTPUT); // Set it as output
IR_TCCRnA = 0x00; // Reset the pwm
IR_TCCRnB = 0x00;
//printf_P(PSTR("FREQ CODE: %hd\r\n"), code[PRONTO_FREQ_CODE]);
uint16_t top = ( (F_CPU/1000000.0) * code[PRONTO_FREQ_CODE] * 0.241246 ) - 1;
//printf_P(PSTR("top: %hu\n\r"), top);
IR_ICRn = top;
IR_OCRn = top >> 1;
IR_TCCRnA = (1<<WGM11);
IR_TCCRnB = (1<<WGM13) | (1<<WGM12);
IR_TCNTn = 0x0000;
IR_TIFRn = 0x00;
IR_TIMSKn = 1 << IR_TOIEn;
ir_seq_index = PRONTO_CODE_START;
ir_cycle_count = 0;
ir_on();
IR_TCCRnB |= (1<<CS10);
}
#define TOTAL_CYCLES 80000 // Turns off after this number of
// cycles. About 2 seconds.
// FIXME: Turn off after having sent all data
ISR(TIMER1_OVF_vect) {
uint16_t sequenceIndexEnd;
uint16_t repeatSequenceIndexStart;
ir_total_cycle_count++;
ir_cycle_count++;
if (ir_cycle_count== ir_code[ir_seq_index]) {
ir_toggle();
ir_cycle_count = 0;
ir_seq_index++;
sequenceIndexEnd = PRONTO_CODE_START +
(ir_code[PRONTO_SEQUENCE1_LENGTH]<<1) +
(ir_code[PRONTO_SEQUENCE2_LENGTH]<<1);
repeatSequenceIndexStart = PRONTO_CODE_START +
(ir_code[PRONTO_SEQUENCE1_LENGTH]<<1);
if (ir_seq_index >= sequenceIndexEnd ) {
ir_seq_index = repeatSequenceIndexStart;
if(ir_total_cycle_count>TOTAL_CYCLES) {
ir_off();
TCCR1B &= ~(1<<CS10);
}
}
}
}
void ir_stop()
{
IR_TCCRnA = 0x00; // Reset the pwm
IR_TCCRnB = 0x00;
}
const uint16_t inputLength = 512;
void loop() {
if (irrecv.decode(&results)) {
dump(&results);
irrecv.resume(); // Receive the next value
}
if ( Serial.available() > 0 )
{
static char input[inputLength];
static uint16_t i;
char c = Serial.read();
if ( c != '\r' && c != '\n' && i < inputLength-1)
input[i++] = c;
else
{
input[i] = '\0';
i = 0;
uint16_t array[80];
uint16_t j = 0;
if ( !strncmp(input, "SEND", 4) )
{
char* p = input+4;
while ( (p = strchr(p, ' ')) != NULL )
array[j++] = strtol(p, &p, 16);
ir_start(array);
Serial.print("SENT ");
for ( uint8_t i = 0; i < j; i++ )
{
Serial.print ("0x");
Serial.print (array[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
}
}مواردی که ممکن است به آنها نیاز داشته باشید
-
آمازون
-
ایبی
منابع و مراجع
فایلها📁
هیچ فایلی موجود نیست.
























