Этот учебник является частью: Сервомоторы
Здесь перечислены все видеоролики, связанные с сервомоторами. Ссылки на другие видео находятся ниже этой статьи.

Управление сервомоторами с помощью инфракрасного пульта на Arduino
```html
Управление серводвигателями с помощью инфракрасного пульта и Arduino
Этот проект демонстрирует, как управлять сервомотором с помощью инфракрасного (ИК) пульта и Arduino. Эта установка позволяет беспроводным образом управлять положением сервомотора, что делает ее идеальной для различных приложений.


Вот несколько идей проектов с использованием этой настройки:
- Удаленная настройка панорамирования и наклона камеры.
- Управление движениямиrobotic руки.
- Автоматизация жалюзи или штор.
- Создание интерактивных художественных инсталляций.
- Постройка радиоуправляемой машины или транспортного средства.
Оборудование/Компоненты
- Плата Arduino (например, Uno, Nano)
- Сервомотор
- ИП-пульт дистанционного управления (любой стандартный пульт подойдет, но код настроен для конкретных пультов)
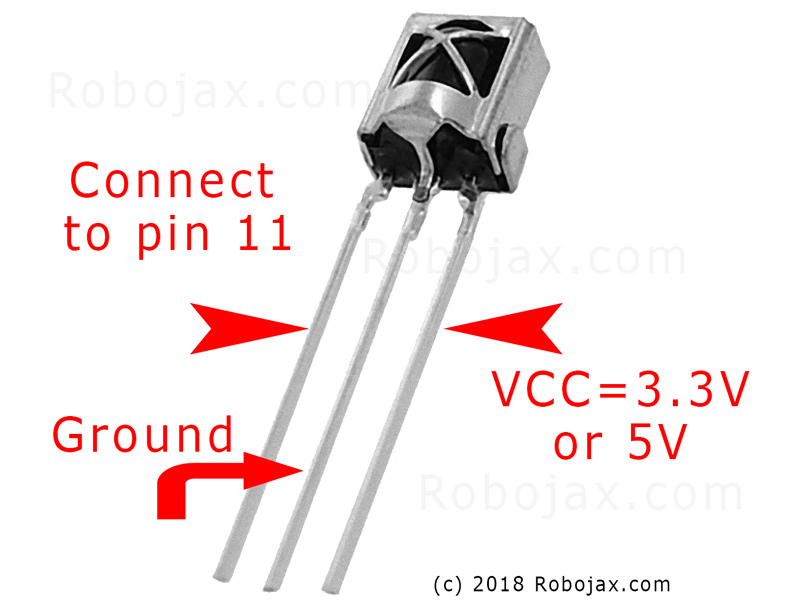
- ИР-приемный модуль (например, TSOP1838)
- Проводки для соединений
- Макетная плата (по желанию)
Схема подключения
Серводвигатель имеет три провода: земля (обычно коричневый или черный), питание (обычно красный) и сигнал (часто оранжевый или белый). ИК-приемник также имеет три провода: земля, питание (VCC) и сигнал.
(в видео на 01:46)

- Серво Земля к Земле Arduino
- Сервоприводное питание для Arduino 5V
- Сигнал сервопривода на пин 8 Ардуино (в видео на 02:23)
- ИР-приемник земля к земле Ардуино
- Приемник ИК VCC к Arduino 5В
- ИР-приемник сигнал на пин 11 Arduino (в видео на 02:38)
Объяснение кода
Код начинается с подключения необходимых библиотек для ИК-связи и управления сервоприводом. (в видео на 03:16)
#include <IRremote.h>
#include <Servo.h>
Далее определяются необходимые переменные. Вам нужно настроить их в зависимости от вашей конкретной конфигурации. (в видео на 03:44)
const char type = 'B'; // 'W' for white remote, 'B' for black remote
const boolean PCB = 0; // 1 if the IR receiver has a PCB, 0 if it's a bare module
const int SERVO_PIN = 8; // The pin connected to the servo's signal wire
int angleStep = 10; // How many degrees the servo moves per button press
const int ANGLE_CENTRE = 90; // The center/reset position of the servo
(в видео на 05:06)
Самым важным шагом настройки является соответствие кнопок пульта дистанционного управления конкретным действиям. Код включает массивы для различных типов пультов (белый/черный, PCB/не PCB) и их соответствующие коды кнопок. Вам необходимо определить правильные коды для вашего пульта и назначить их нужным действиям (вправо, влево, по центру). (в видео на 05:16)
const String RIGHT = ">"; // Replace with the code for your "right" button
const String LEFT = "<"; // Replace with the code for your "left" button
const String CENTRE = "OK"; // Replace with the code for your "center" button
(в видео на 08:12)
Пожалуйста, предоставьте текст для перевода.servoAction()функция управляет движением сервопривода на основе полученного ИК сигнала. Она проверяет полученную команду и соответственно регулирует угол сервопривода.angleStepпеременная управляет увеличением или уменьшением положения сервопривода. (в видео в 08:06)
Живой проект/демонстрация
(в видео на 09:56)
Видео демонстрирует, как управлять сервоприводом с помощью различных пультов дистанционного управления. Оно показывает, как настроить код для различных типов пультов и приемников. Демонстрация также охватывает, как захватывать ИК-коды с ваших собственных пультов и интегрировать их в код. (в видео на 12:48)
Главы
- [00:00] Введение и обзор проекта
- [00:36] Компоненты и материалы
- [01:46] Инструкции по подключению
- [03:16] Объяснение кода
- [09:56] Демонстрация проекта
- Использование вашего собственного пульта
```
Изображения
Этот учебник является частью: Сервомоторы
- Controlling a Servo with Push Buttons Using Arduino
- Control a Servo Motor with a Push Button: Move Servo and Return SPB-1
- Control a Servo Motor with a Push Button: Move Servo in One Direction SPB-2
- Controlling a Servo Motor with a Push Button: Move Servo While Button Is Pressed (SPB-3)
- Controlling a Servo with a Potentiometer Using Arduino
- Controlling a Servo with Potentiometer and LCD1602 using Arduino
- Управление сервомотором Arduino с помощью потенциометра
- Управление положением сервопривода с помощью жестов рук для Arduino
- Controlling Two or More Servos with Potentiometers Using an Arduino
- How to Control a 360° Servo with Three Push-Button Switches
- How to Use Continuous 360° Servo with Arduino
- Код Arduino и видео для сервоконтроллера PCA9685 на 16 каналов с разрешением 12 бит V1
- Build an Arduino Servo Toggle Switch with a Push Button
This code has not been parsed yet. Please return to the admin panel to parse it.Вещи, которые могут вам понадобиться
-
Амазонка
-
eBay
Ресурсы и ссылки
Ресурсов пока нет.
Файлы📁
Нет доступных файлов.