15A 400W MOSFET AOD4184A用于控制电机或负载
本项目演示如何使用一个15A、400W的MOSFET模块(基于AOD4184A MOSFET)来控制各种负载,如电动机和灯光。这是一项对许多应用非常有价值的技能,可以实现精确的电源控制。MOSFET的高电流能力使其适用于广泛的项目。
实际应用:
- 在机器人或自动化项目中控制直流电动机的速度。
- 为LED照明创建调光电路。
- 为电器构建高功率开关电路。
- 为小型车辆设计电机控制器。
硬件/组件
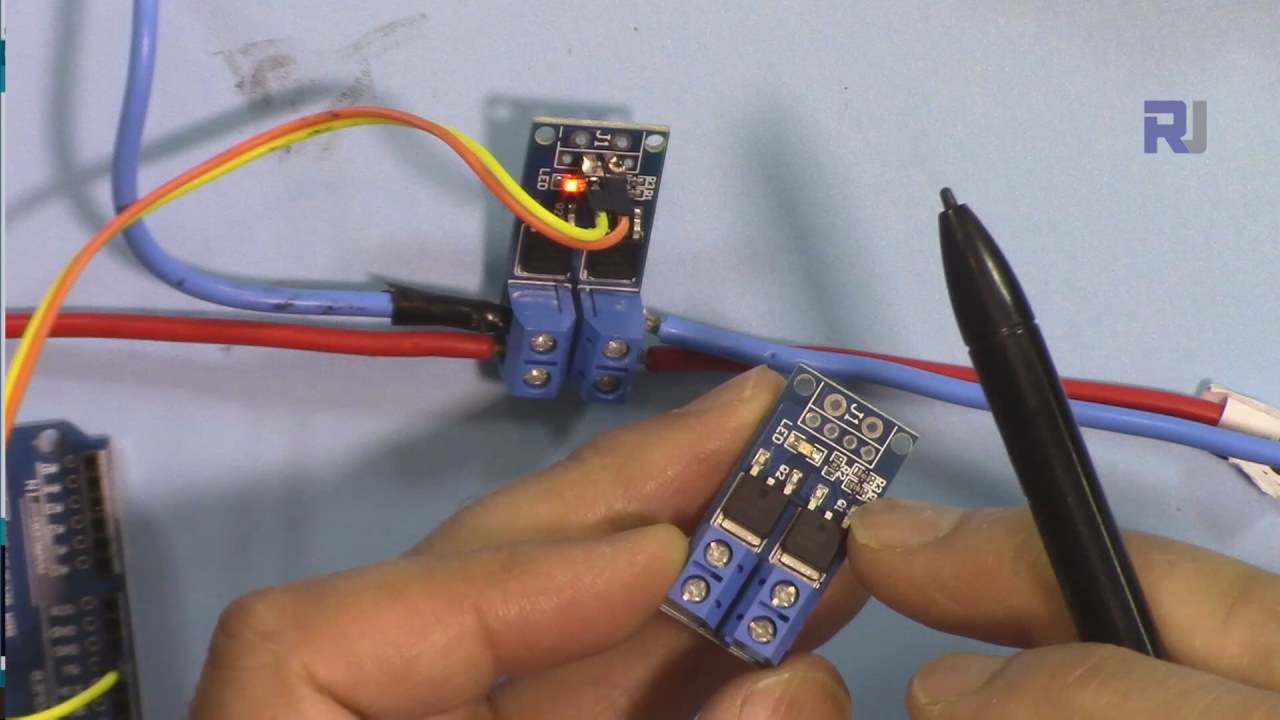
核心组件是一个15A、400W的MOSFET模块,具有两个并联的AOD4184A MOSFET(在视频中显示于00:05)。您还需要一个Arduino板、一个电源、连接线和您希望控制的负载(电机、灯等)。对于高电流应用,强烈建议使用散热器(在视频中显示于03:40)。


接线指南
该模块有清晰标记的接线端子:输入(V在), 输出,和接地(视频中的 01:42)。将电源的正极连接到 V在,负极接地。你的负载连接到输出端子。Arduino通过一个数字引脚控制MOSFET模块的门(视频中在08:26)。


代码解释
Arduino代码使用脉宽调制(PWM)来控制MOSFET。可配置的参数包括:
motorPin指定连接到MOSFET模块闸门的Arduino引脚(默认:引脚9)。mSpeed一个控制电机速度的整数变量(0-255)。mStep确定增量/减量步骤 дляmSpeed(默认: 15)。调整此值以微调速度控制(视频时间为 05:54)。
int motorPin =9; // pin to connect to motor module
int mSpeed = 0; // variable to hold speed value
int mStep = 15; // increment/decrement step for PWM motor speed
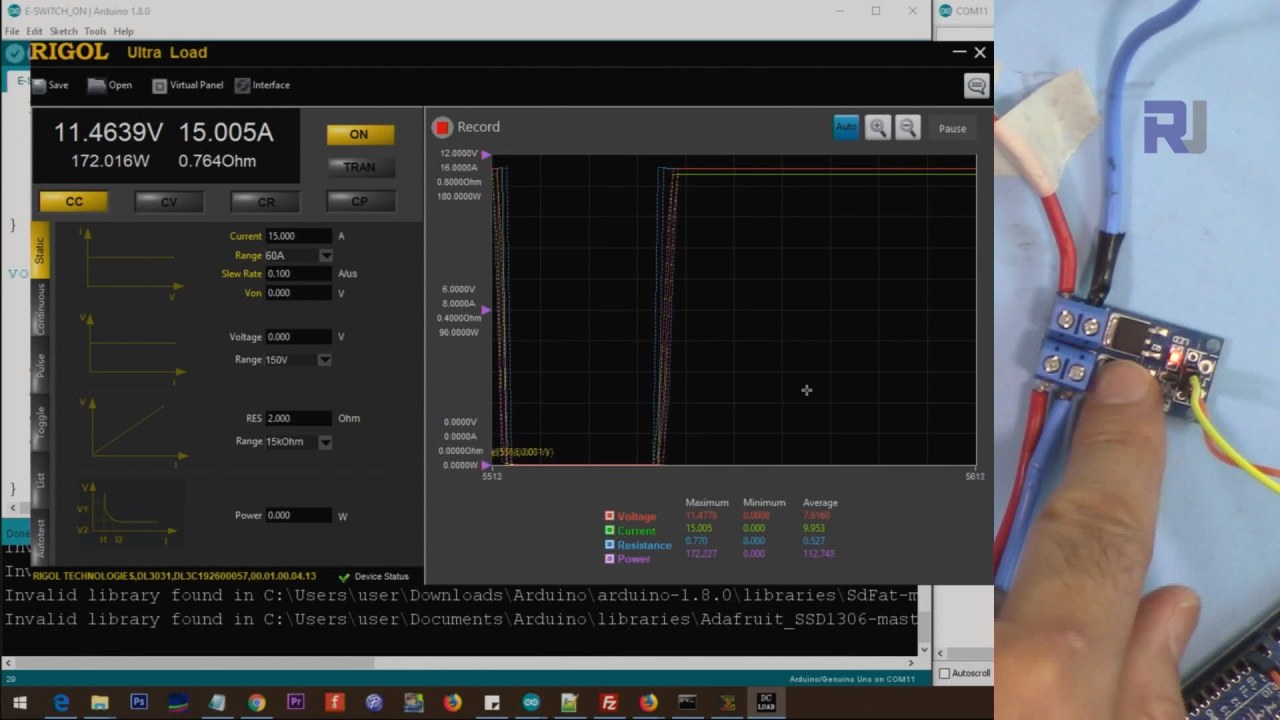
代码包含防止的逻辑mSpeed超出 0-255 范围(见视频:07:26)。为了测试更高的电流(5A、10A、15A、20A),简化版本的代码保持输出引脚为 HIGH,以维持恒定的开启状态(见视频:13:43)。
void loop() {
digitalWrite(loadPin, HIGH);
while(1); // wait forever
}
现场项目/演示
该视频演示了使用PWM控制一个51W的灯泡(在视频的10:40)和一个直流电机(在视频的11:18)。该项目还包括对电子负载在5A、10A、15A和20A下的测试(在视频的13:10),展示了模块的高电流处理能力。视频中还显示了在不同电流下MOSFET的电压降测量(在视频的16:06),验证了AOD4184A的低导通电阻。
章节
- [00:00] 介绍与项目概览
- 硬件概述和模块详细信息
- [05:01] MOSFET 数据表说明
- [05:47] 代码解释
- [08:26] 接线说明
- [10:40] 使用51W灯进行演示
- [11:18] 使用直流电动机的演示
- 高电流测试(5A,10A,15A,20A)
- 电压下降测量
图像
15A 400W MOSFET AOD4184A 用于控制电机或负载
15A 400W MOSFET AOD4184A 用于控制电机或负载
mosfet_AOD4184A_module_wiring
AOD4184A-_mosfet_module-main
AOD4184A-_mosfet_module-main-15A
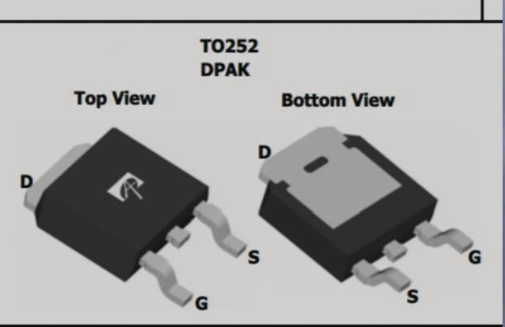
AOD4184A_pinout
134-Code example using a resistor
语言: C++
This code has not been parsed yet. Please return to the admin panel to parse it.135-Testing MOSFET AOD4184A using 5A, 10A, 15A, 20A, and 25A loads
语言: C++
This code has not been parsed yet. Please return to the admin panel to parse it.|||您可能需要的东西
-
易趣从eBay购买15A 400W Mosfet模块ebay.us
-
全球速卖通从阿里巴巴进口15A 400W MOSFET模块s.click.aliexpress.com
资源与参考
尚无可用资源。
文件📁
Fritzing 文件
-
xy-mos-d4184 AOD4184A MOSFET
xy-mos-d4184.fzpz0.01 MB
其他文件
-
alpha-and-Omega-AOD4184A_数据表
alpha-and-Omega-AOD4184A_datasheet.pdf0.43 MB