15A 400W MOSFET AOD4184Aを使用してモーターまたは負荷を制御する
このプロジェクトは、15A、400WのMOSFETモジュール(AOD4184A MOSFETに基づく)を使用して、モーターや照明などのさまざまな負荷を制御する方法を示しています。これは、多くのアプリケーションにおいて貴重なスキルであり、電力供給の精密な制御を可能にします。MOSFETの高い電流容量は、幅広いプロジェクトに適していることを示しています。
実用的な応用:
- ロボット工学や自動化プロジェクトにおけるDCモーターの速度制御。
- LED照明用の調光回路を作成する。
- 家電用の高出力スイッチング回路を構築すること。
- 小型車両用のモーターコントローラーの設計。
ハードウェア/コンポーネント
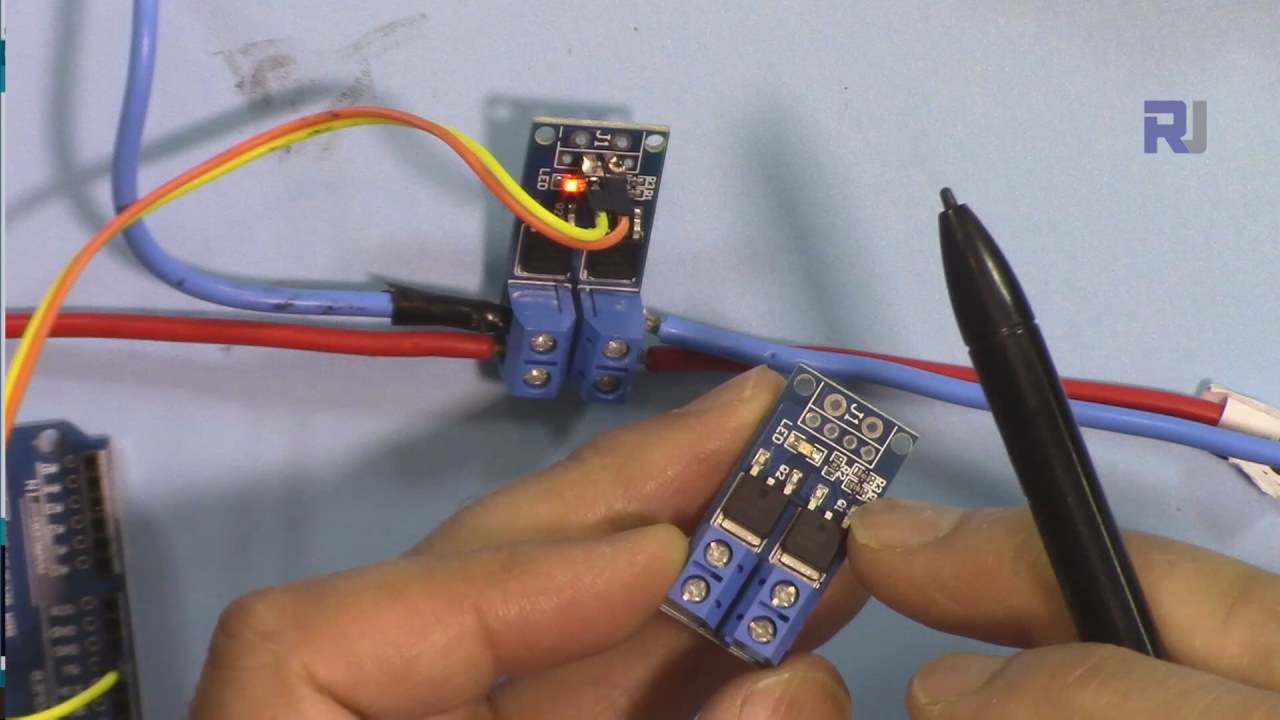
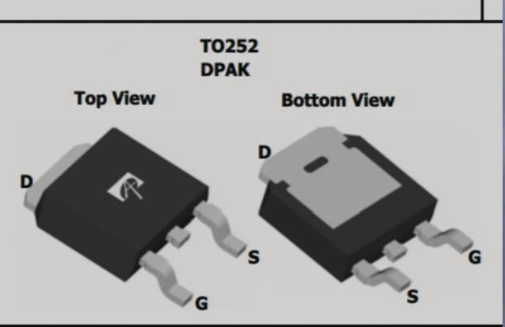
コアコンポーネントは、2つのAOD4184A MOSFETが並列に配置された15A、400WのMOSFETモジュールです(動画の00:05で)。また、Arduinoボード、電源、接続ワイヤー、および制御したい負荷(モーター、ライトなど)が必要です。高電流アプリケーションにはヒートシンクを強く推奨します(動画の03:40で)。


配線ガイド
モジュールには明確に印が付けられた端子があります:入力 (V内で), 出力、およびグラウンド(ビデオの 01:42 を参照)。電源の正側を V に接続します。中に、そして負端子を地面に接続します。あなたの負荷は出力端子に接続されます。Arduinoはデジタルピンを使用してMOSFETモジュールのゲートを制御します(ビデオの08:26で)。


コード説明
Arduinoのコードは、MOSFETを制御するためにパルス幅変調(PWM)を使用しています。設定可能なパラメータは次のとおりです:
motorPinMOSFETモジュールのゲートに接続されているArduinoピンを指定します(デフォルト:ピン9)。 (動画の時間: 05:47)mSpeed整数変数でモーターの速度を制御します (0-255)。 (動画の 05:47 にて)mStep増加/減少ステップを決定しますmSpeed(デフォルト:15)。これを調整して速度制御を微調整します(動画の05:54にて)。
int motorPin =9; // pin to connect to motor module
int mSpeed = 0; // variable to hold speed value
int mStep = 15; // increment/decrement step for PWM motor speed
コードには防止するためのロジックが含まれています。mSpeed0-255の範囲を超えないようにする(ビデオの07:26で)。より高い電流(5A、10A、15A、20A)をテストするために、出力ピンをHIGHに保つ簡略化されたバージョンのコードが一定のオン状態を維持します(ビデオの13:43で)。
void loop() {
digitalWrite(loadPin, HIGH);
while(1); // wait forever
}
ライブプロジェクト/デモンストレーション
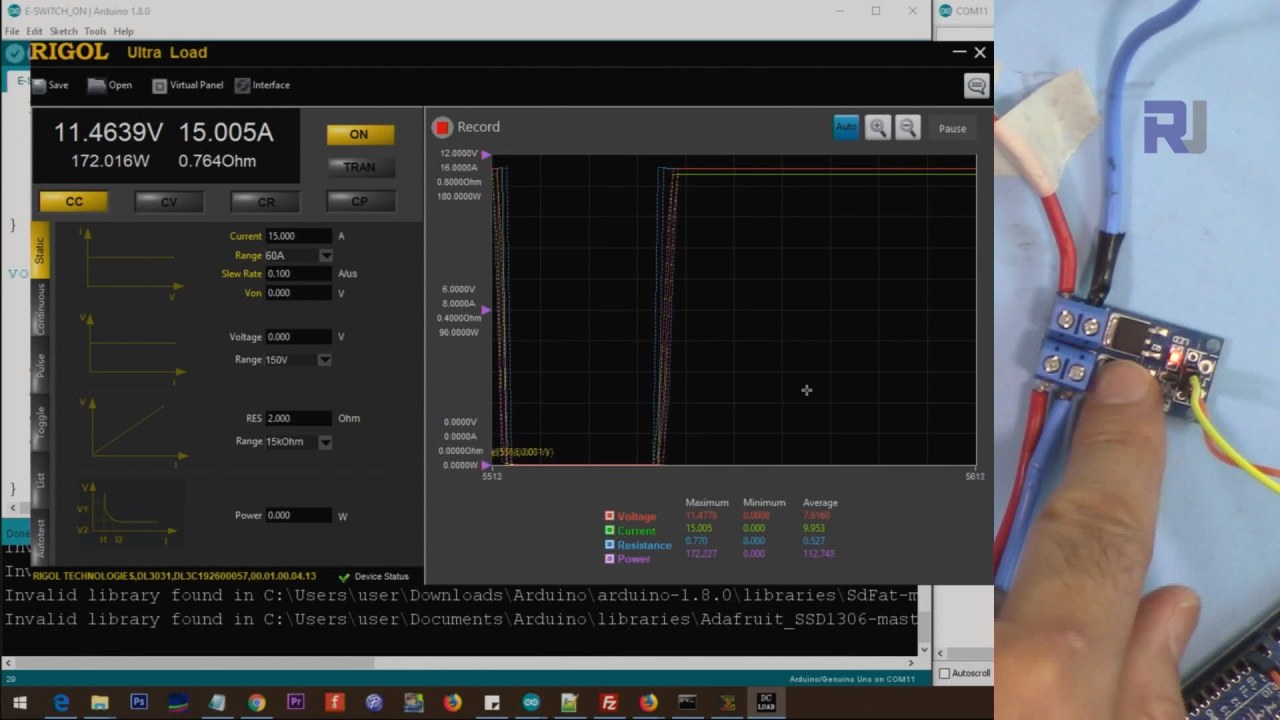
このビデオでは、PWMを使用して51Wの電球(ビデオの10:40に)とDCモーター(ビデオの11:18に)を制御する様子が示されています。このプロジェクトには、5A、10A、15A、20Aの電子負荷でのテストも含まれており(ビデオの13:10に)、モジュールの高電流処理能力を展示しています。さまざまな電流でのMOSFETの電圧降下の測定も示されており(ビデオの16:06に)、AOD4184Aの低いオン抵抗が確認されています。
章
- [00:00] はじめにとプロジェクト概要
- [01:40] ハードウェア概要とモジュールの詳細
- [05:01] MOSFET データシートの説明
- [05:47] コードの説明
- [08:26] 配線説明
- [10:40] 51Wライトを使用したデモンストレーション
- [11:18] DCモーターを用いたデモンストレーション
- 高電流テスト (5A, 10A, 15A, 20A)
- [16:06] 電圧降下測定
画像
/*
* This is an Arduino sketch for a tutorial video
* explaining why a resistor is needed when using a push button
* with an Arduino to connect the pin to Ground (GND)
*
* Written by Ahmad Shamshiri on July 18, 2018 at 17:36 in Ajax, Ontario, Canada
* For Robojax.com
* Watch the instructional video for this code: https://youtu.be/tCJ2Q-CT6Q8
* This code is "AS IS" without warranty or liability. Free to be used as long as you keep this note intact.
*/
int motorPin =9;// pin to connect to motor module
int mSpeed = 0;// variable to hold speed value
int mStep = 15;// increment/decrement step for PWM motor speed
void setup() {
// Robojax.com demo
pinMode(motorPin,OUTPUT);// set mtorPin as output
Serial.begin(9600);// initialize serial motor
Serial.println("Robojax Demo");
}
void loop() {
// Robojax.com tutorial
analogWrite(motorPin, mSpeed);// send mSpeed value to motor
Serial.print("Speed: ");
Serial.println(mSpeed);// print mSpeed value on Serial monitor (click on Tools->Serial Monitor)
mSpeed = mSpeed + mStep;
// See the video for details.
if (mSpeed <= 0 || mSpeed >= 255) {
mStep = -mStep;
}
delay(200);
}/*
* This is an Arduino Sketch for a tutorial video
* explaining the 15A MOSFET AOD4184A used as a switch
* This sketch is used to test the MOSFET with a load at 5A, 10A, 15A, 25A
*
* Written by Ahmad Shamshiri on July 21, 2018 in Ajax, Ontario, Canada
* For Robojax.com
* Watch the instruction video for this code: https://youtu.be/tCJ2Q-CT6Q8
* This code is "AS IS" without warranty or liability. Free to be used as long as you keep this note intact.
*/
int loadPin =9;// load pin
void setup() {
// Robojax.com demo
pinMode(loadPin,OUTPUT);
Serial.begin(9600);
Serial.println("Robojax Demo");
}
void loop() {
// Robojax.com tutorial
digitalWrite(loadPin, HIGH);
while(1);// wait forever
}必要かもしれないもの
-
イーベイeBayから15A 400Wモスファットモジュールを購入するebay.us
-
アリエクスプレスAliExpressから15A 400Wモスフェットモジュールを購入s.click.aliexpress.com
リソースと参考文献
まだリソースはありません。
ファイル📁
フリッツィングファイル
-
xy-mos-d4184 AOD4184A MOSFET
xy-mos-d4184.fzpz0.01 MB
他のファイル
-
alpha-and-Omega-AOD4184A_datasheet
alpha-and-Omega-AOD4184A_datasheet.pdf0.43 MB