Tutorial ESP32 27/55 - Medición de distancia con sensor ultrasónico | Kit de aprendizaje IoT ESP32 de SunFounder
En este tutorial, aprenderemos cómo usar un sensor de distancia ultrasónico con el ESP32 para medir distancias y mostrar los resultados en una pantalla. También exploraremos cómo activar un zumbador cuando se detecte un objeto dentro de un rango específico. Este proyecto destaca la versatilidad del microcontrolador ESP32, que integra capacidades de Wi-Fi y Bluetooth, lo que lo hace adecuado para diversas aplicaciones de IoT.
A lo largo de esta guía, encontrará explicaciones sobre los componentes de hardware, instrucciones de cableado y fragmentos de código para ayudarle a implementar el proyecto con éxito. Para mayor claridad, consulte el video (en el video a las 00:00).
Hardware Explicado
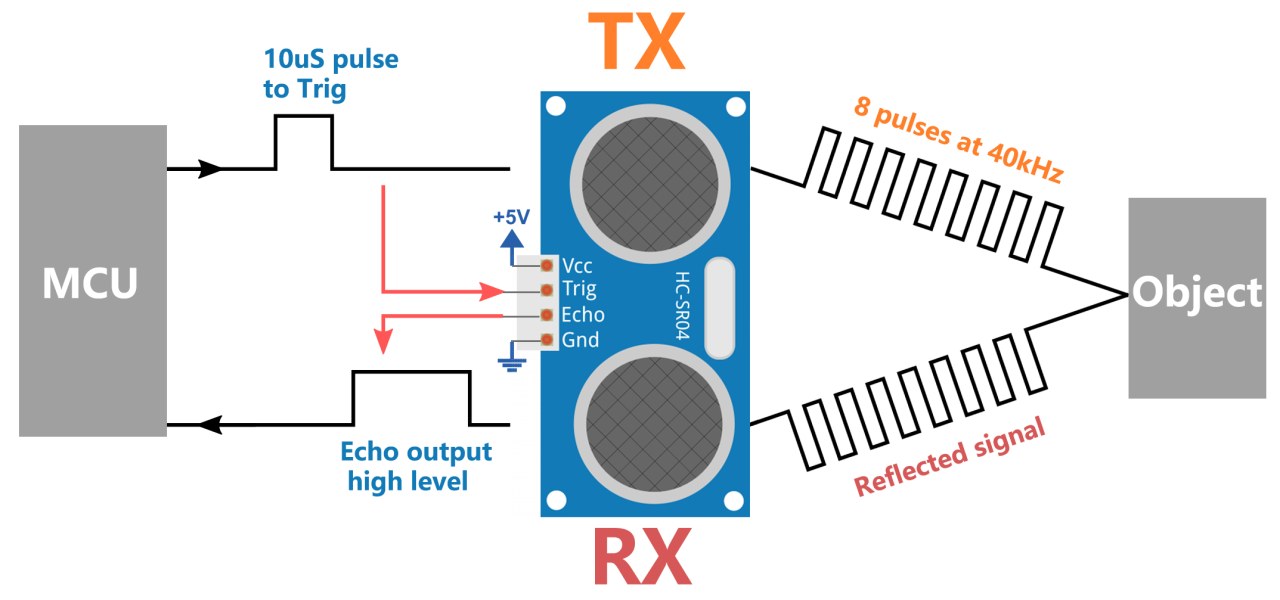
Los componentes principales de este proyecto incluyen el microcontrolador ESP32, el sensor ultrasónico (HC-SR04) y un zumbador. El sensor ultrasónico consta de dos partes principales: un transmisor que emite ondas ultrasónicas y un receptor que escucha las ondas reflejadas. Al medir el tiempo que tardan las ondas en regresar, podemos calcular la distancia a un objeto.
El ESP32 funciona como el controlador central, procesando datos del sensor ultrasónico y controlando el zumbador según la distancia medida. El zumbador sonará cuando la distancia detectada sea menor que un umbral definido, indicando que un objeto está demasiado cerca.
Detalles de la hoja de datos
| Fabricante | HC-SR04 |
|---|---|
| Número de pieza | HC-SR04 |
| Tensión de lógica/entrada/salida | 5 V |
| Tensión de alimentación | 5 V |
| Corriente de salida (por canal) | 16 mA |
| Corriente pico (por canal) | ... |
| Guía de frecuencia PWM | ... |
| Umbrales de lógica de entrada | ... |
| Caída de tensión / RDS(on)/ saturación | ... |
| Límites térmicos | ... |
| Paquete | ... |
| Notas / variantes | Rango de medición: 2 cm a 400 cm |
- Asegure un suministro de energía adecuado de 5 V para el sensor.
- Mantén un camino claro para las ondas ultrasónicas para evitar interferencias.
- Utiliza cables cortos para minimizar el retraso de señal y el ruido.
- Asegúrese de realizar las conexiones de pines correctamente para evitar malentendidos.
- Prueba el sensor en diversos entornos para verificar su precisión.
Instrucciones de cableado

Para conectar el sensor ultrasónico al ESP32, conecta el pin VCC del sensor al pin de 5V en el ESP32. A continuación, conecta el pin GND del sensor a uno de los pines de tierra (GND) en el ESP32. El pin de activación (Trig) del sensor debe conectarse al GPIO 26 en el ESP32, mientras que el pin de eco (Echo) debe conectarse al GPIO 25. Esta configuración permite que el ESP32 envíe una señal al sensor y reciba la señal de eco para calcular la distancia.

Para el zumbador, conecta la pata positiva (larga) al GPIO 12 en el ESP32 y la pata negativa (corta) a la GND. Asegúrate de que todas las conexiones estén seguras para evitar cables sueltos durante la operación. Si estás usando una placa de pruebas, alinea las conexiones del zumbador correctamente para evitar un mal cableado. Asegúrate de consultar el video para la confirmación del cableado (en el video a las 05:12).
Ejemplos de código y guía paso a paso
El código inicializa los pines para el sensor ultrasónico y configura la comunicación serial. La función principal,readSensorData()es responsable de enviar una señal de disparo y medir el tiempo de respuesta desde el pin de eco.
const int echoPin = 25;
const int trigPin = 26;
void setup() {
Serial.begin(115200);
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
Serial.println("Ultrasonic sensor:");
}
El código defineechoPinytrigPincomo constantes para los pines conectados al sensor ultrasónico. En elsetup()función, inicializamos la comunicación serie y configuramos los modos de los pines en consecuencia.
float readSensorData() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
unsigned long microsecond = pulseIn(echoPin, HIGH);
float distance = microsecond / 29.00 / 2;
return distance;
}
Este extracto muestra elreadSensorData()función, que envía un pulso de 10 microsegundos al pin de activación. Luego mide el tiempo que tarda el pin de eco en recibir la señal de regreso, calcula la distancia y devuelve este valor.
Finalmente, la función de bucle lee continuamente la distancia y la imprime en el monitor serial. Si la distancia es inferior a 20 cm, se activará el zumbador.
Demostración / Qué Esperar
Cuando ejecutes el programa, el ESP32 mostrará la distancia medida en centímetros en el monitor serial. Si un objeto entra a menos de 20 cm del sensor, el zumbador sonará. Este comportamiento se puede probar colocando objetos a diversas distancias frente al sensor. Ten cuidado con la polaridad invertida y asegúrate de que las conexiones se realicen como se especifica para evitar problemas durante la operación (en el video a las 08:00).
Marcas de tiempo del video
- 00:00 Inicio
- 1:46 Introducción al Sensor Ultrasónico
- 6:02 Explicación del cableado
- 7:37 Código de Arduino ESP32 explicado
- 11:33 Seleccionando la placa ESP32 y el puerto COM en Arduino IDE
- 13:15 Demostración de medición de distancia
- 16:43 Acción de cambiar de rumbo con distancia: timbre
Imágenes
/*
* // Definir pines para el sensor ultrasónico
*/
const int echoPin = 25;
const int trigPin = 26;
// Prototipo de función para leer datos del sensor.
float readSensorData();
void setup() {
// Iniciar comunicación serial a 115200 baudios
Serial.begin(115200);
// Configura echoPin como entrada y trigPin como salida.
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
// Imprimir información del sensor en el monitor serial
Serial.println("Ultrasonic sensor:");
}
void loop() {
// Leer distancia del sensor ultrasónico
float distance = readSensorData();
// Imprime la distancia medida en el monitor serial.
Serial.print(distance);
Serial.println(" cm");
// Retraso entre lecturas
delay(200);
}
// Función para leer datos del sensor ultrasónico
float readSensorData() {
// Emite una señal baja antes de enviar una señal alta.
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Envía una señal alta de 10 microsegundos al trigPin.
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
// Volver a la señal baja
digitalWrite(trigPin, LOW);
// Mide la duración de la señal alta en el echoPin.
unsigned long microsecond = pulseIn(echoPin, HIGH);
// Calcula la distancia utilizando la velocidad del sonido (29.00µs por centímetro)
float distance = microsecond / 29.00 / 2;
// Devuelve la distancia calculada.
return distance;
}
Common Course Links
Common Course Files
Cosas que podrías necesitar
-
eBay
-
BanggoodCompra el sensor ultrasónico HC-SR04 en Banggood.banggood.com
Recursos y referencias
-
Documentación
-
ExternoBiblioteca ultrasónica HC-SR04 del sitio web oficial de Arduinoplayground.arduino.cc
Archivos📁
No hay archivos disponibles.