
How to use YYNMOS-4 4ch MOSFET to control 5A to 20A DC Motor or LED light strip
How to use YYNMOS-4 4ch MOSFET to control 5A to 20A DC Motor or LED light strip
This tutorial shows you how to use the YYNMOS-4 4 Channel MOSFET Module to control intensity of LIGH or speed of 4 motors. Module is explained, Arduino code explained and testd.
Topic timing in the video
- 00:58 Hardware Explained
- 07:53 Wiring Explained
- 10:13 Arduino Code for YYNMOS-4 Explained
- 14:51 Demonstration without Arduino
- 16:32 Demonstration with Arduino
YYNMOS-4 Main module image
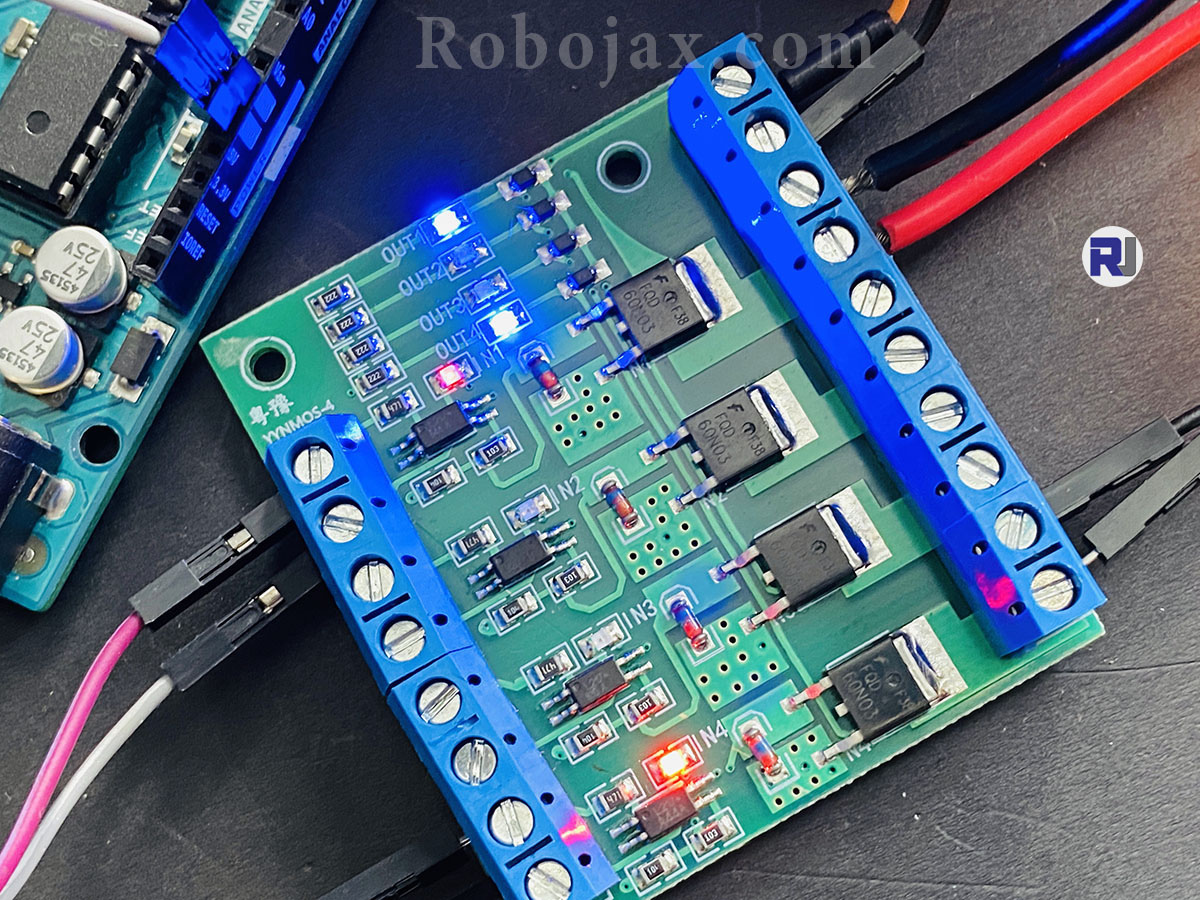
Click on image to enlarge
YYNMOS-4 With Arduino 1
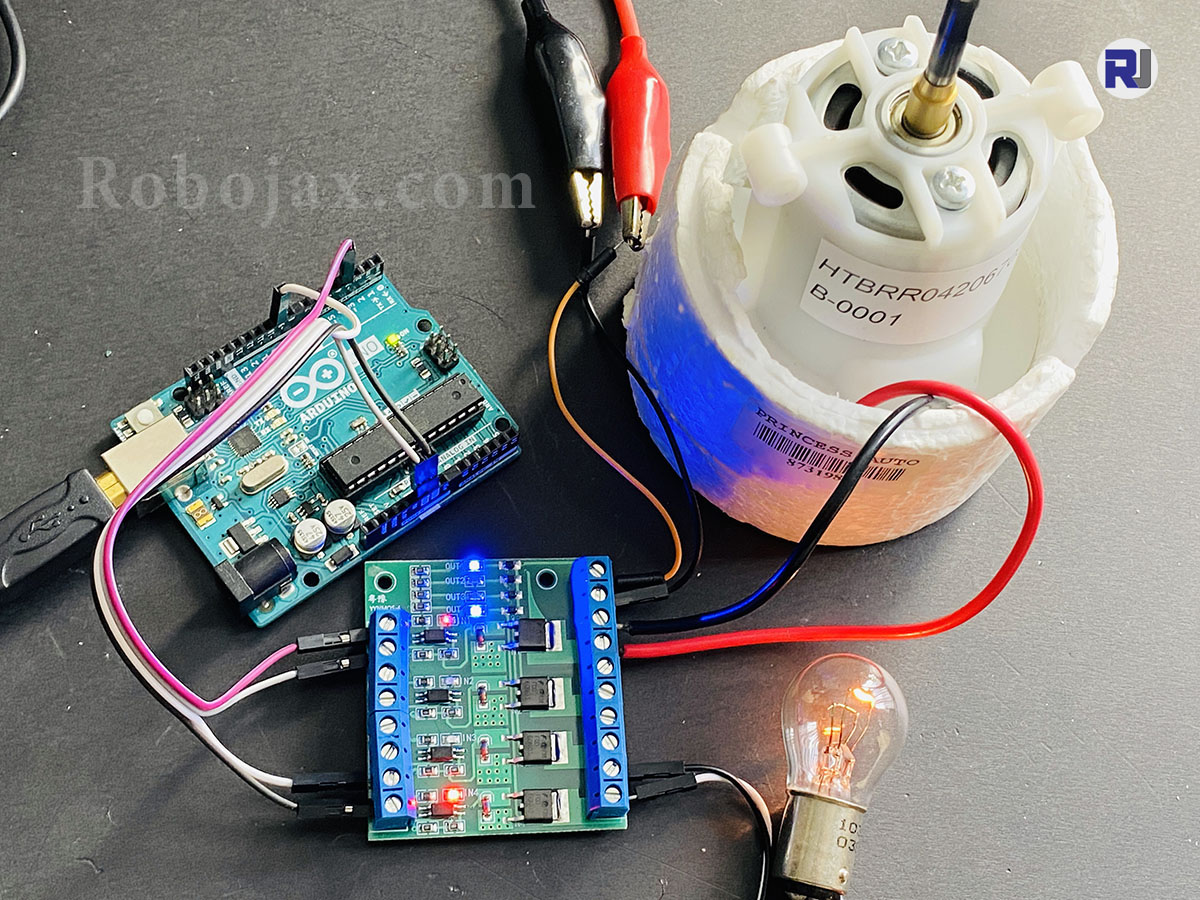
Click on image to enlarge
YYNMOS-4 With Arduino 2
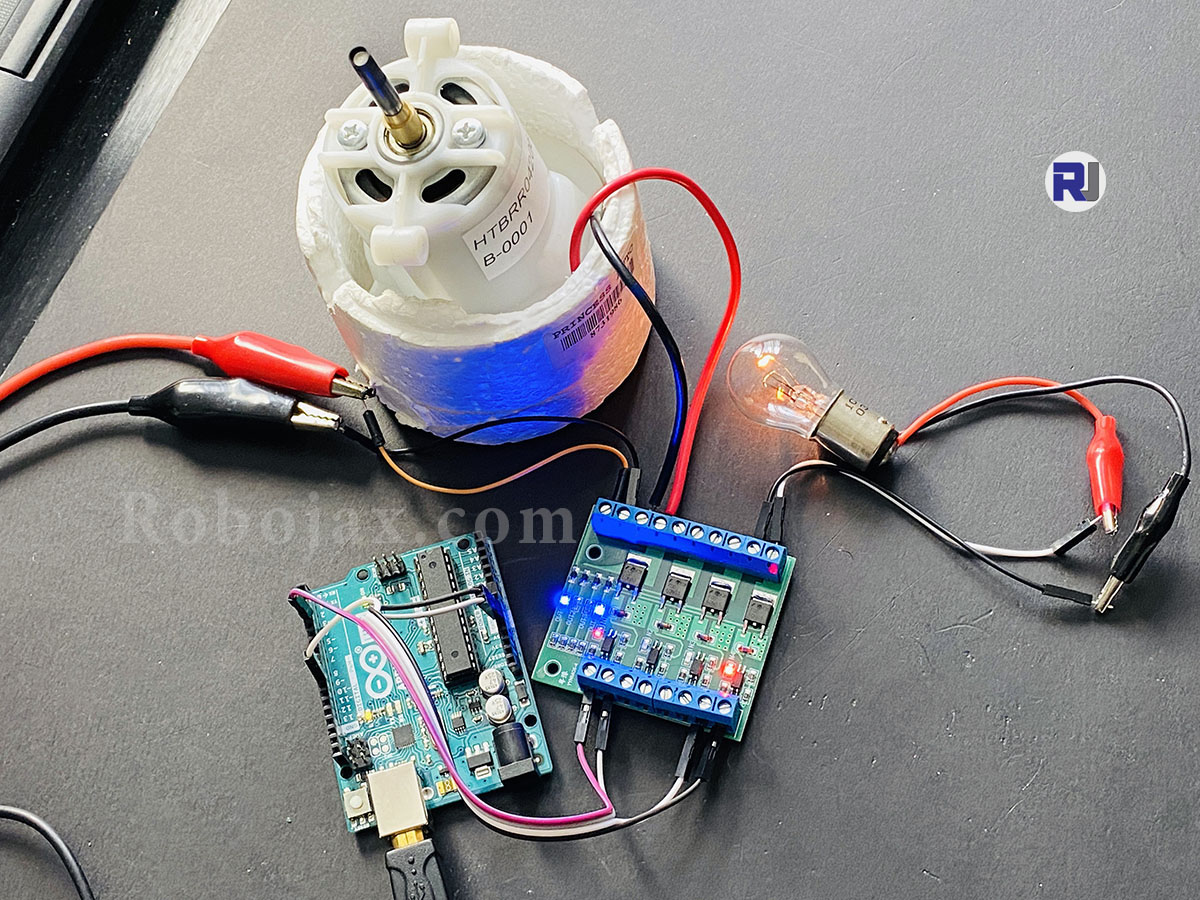
Click on image to enlarge
YYNMOS-4 Arduino Wiring Close up
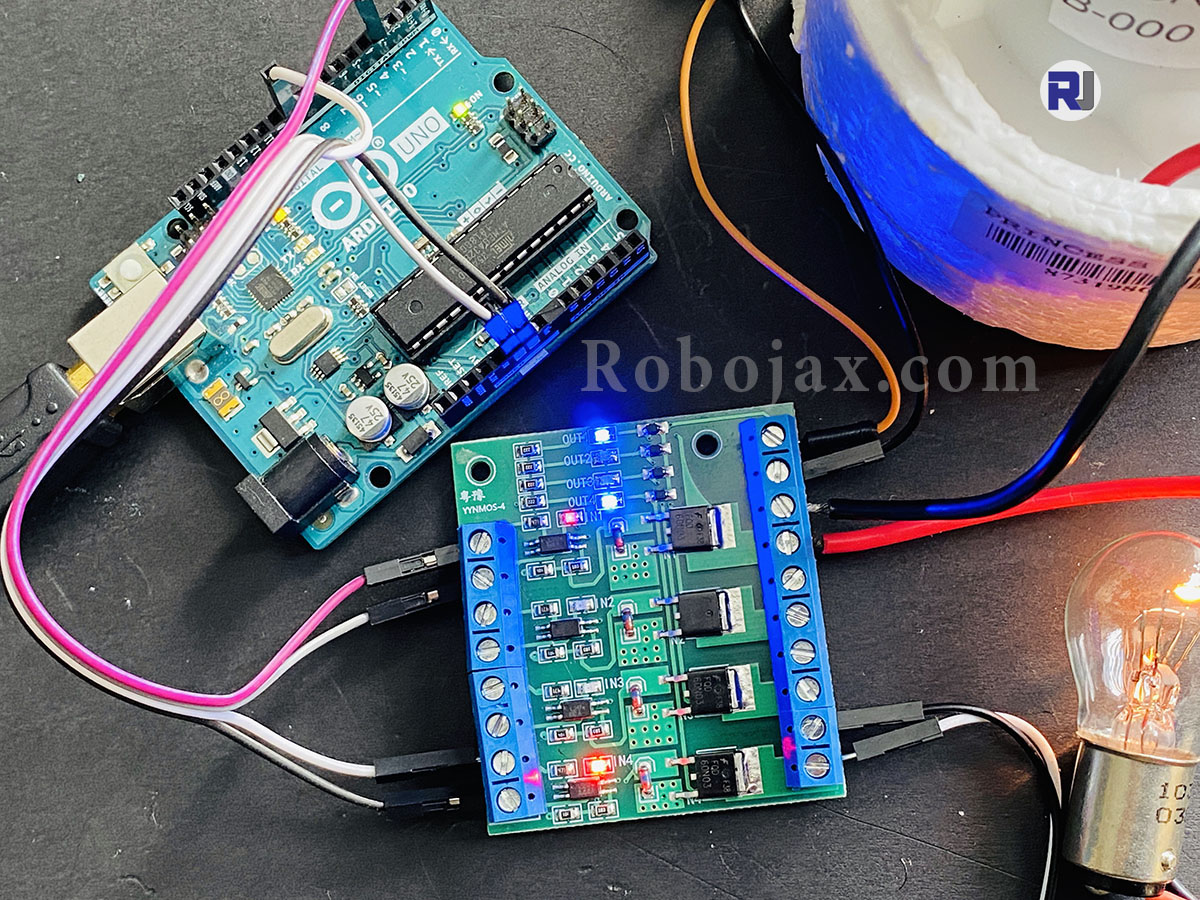
Click on image to enlarge
YYNMOS-4 Arduino Wiring with LED Strip
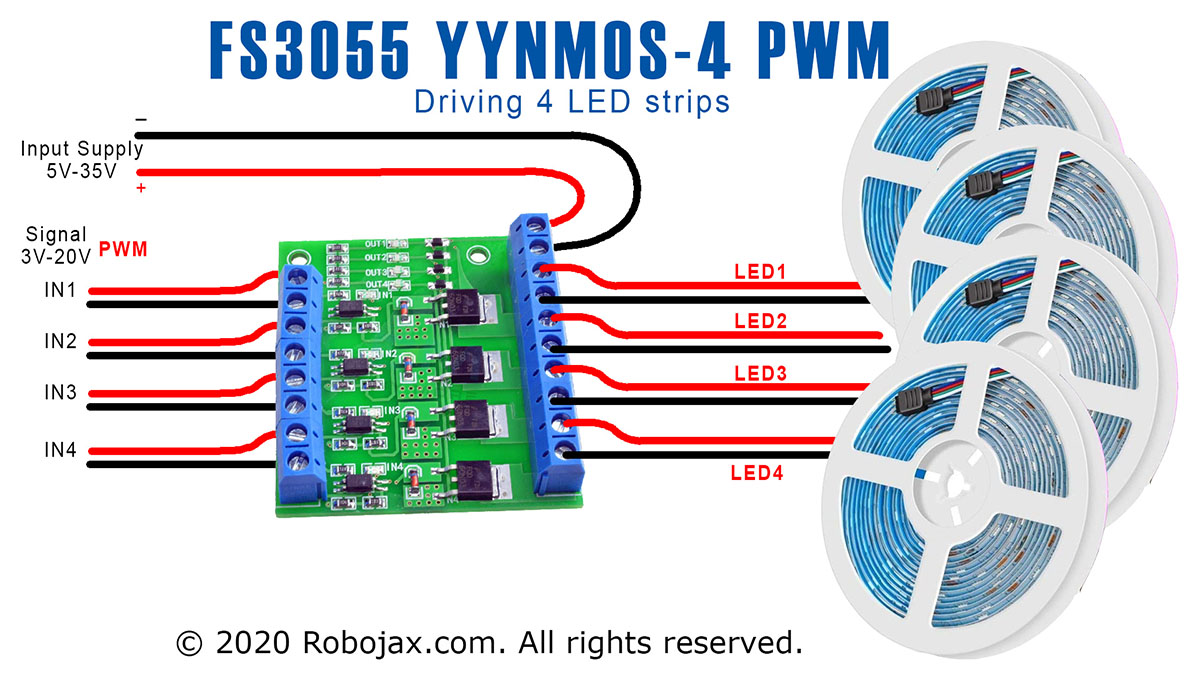
Click on image to enlarge
YYNMOS-4 Arduino Wiring with DC Motors
Click on image to enlarge
Components used in this module
- 60N03 Mosfet 12m ohm, 30V 45A Datasheet(pdf)
- ACPL-217 Phototransistor Optocoupler Datasheet(pdf)
- 1N4148 (T4) SMD Fast Switching Doide Datasheet(pdf)
- Robojax Crash Course on Arduino: Learn Arduino in 30 Minutes (code and video)
- Robojax Arduino Course on Udemy
- Get Early Access to my videos via Patreon
Arduino code for Sharp GP2Y0A51SK0F Distance Sensor
/*
* This is Arduio code to control 4 DC motor's speed or 4 LED light strip or other DC load
* buy utilizing YYNMOS-4 4 channel mosfet module
We can control 4 DC Motors with voltage of 5V to 35V and 5A each.
* Written by Ahmad Shamshiri on July 13, 2020
* in Ajax, Ontario, Canada. www.robojax.com
*
*
* Watch video instruction for this code: https://youtu.be/G9uHVcITHf8
*
If you found this tutorial helpful, please support me so I can continue creating
content like this. You can support me on Patreon http://robojax.com/L/?id=63
or make donation using PayPal http://robojax.com/L/?id=64
* This code has been download from Robojax.com
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <https://www.gnu.org/licenses/>.
*/
int pin1 = 3;//pwm
int pin2 = 5;//pwm
int pin3 = 6;//pwm
int pin4 = 9;//pwm
int ON = HIGH;
int OFF = LOW;
int motor[]={NULL,pin1, pin2, pin3, pin4};
void setup() {
Serial.begin(9600);
Serial.println("Robojax.com 4 DC Motor or LED");
pinMode(motor[1], OUTPUT);
pinMode(motor[2], OUTPUT);
pinMode(motor[3], OUTPUT);
pinMode(motor[4], OUTPUT);
}
void loop() {
motorON(1, 75);//run motor 1 at 75% speed
delay(4000);//for 4 seconds
motorON(4, 100);//run motor 4 at 100% speed (or 100% light intensity)
delay(4000); //for 4 seconds
stop(1);//stop motor 1
delay(3000);//keep it stopped for 3 second
stop(4);//stop motor 4
delay(3000); //keep it stopped for 3 seconds
for(int i=0; i<=100; i++)
{
motorON(1,i); //change speed of motor 1
delay(100);
}
delay(3000);//keep running for 3 seconds
stop(1);//stop motor 1
delay(3000);//keep it stopped for 3 seconds
for(int i=100; i>=0; i--)
{
motorON(1,i); //change speed of motor 1
delay(100);
}
delay(3000); //keep it running for 3 seconds
for(int i=0; i<=100; i++)
{
motorON(4,i);
delay(100);
}
delay(3000);//keep it at for 3 seconds
for(int i=100; i>=0; i--)
{
motorON(4,i);
delay(100);
}
}// loop
/*
motorON(int n, int sp)
* @brief runs the specific motor n with speed sp
* @param n, is integet from 1 to 4
* @param sp, is speed in % from 0 to 100
* @return does not return anything
* Written by Ahmad Shamshiri
* www.Robojax.com code July 13, 2020 in Ajax, Ontario, Canada
*/
void motorON(int n, int sp)
{
if(n >=1 && n <=4)
{
int speed=map(sp, 0, 100, 0, 255);
analogWrite(motor[n],speed);
Serial.print("Load ");
Serial.print(n);
Serial.print(" @");
Serial.print(sp);
Serial.println("%");
}else{
Serial.println("Motor/load number should be between 1 and 4");
while(1);// stop forever
}
}//motorON(int n)
/*
stop(int n)
* @brief stops the specific motr
* @param n, is integet from 1 to 4
* @return does not return anything
* Written by Ahmad Shamshiri
* www.Robojax.com code July 13, 2020 in Ajax, Ontario, Canada
*/
void stop(int n)
{
if(n >=1 && n <=4)
{
digitalWrite(motor[n], LOW);
Serial.print("Load ");
Serial.print(n);
Serial.println(" Stopped");
}else{
Serial.println("Motor/load number should be between 1 and 4");
while(1);// stop forever
}
}//stop(int n)