
Using two or more VL53L0X Laser Distance meter with Arduino
Using two or more VL53L0X Laser Distance meter with Arduino
This video shows you how to use two or more VL53L0X module to measure distance.See using 4 sensors
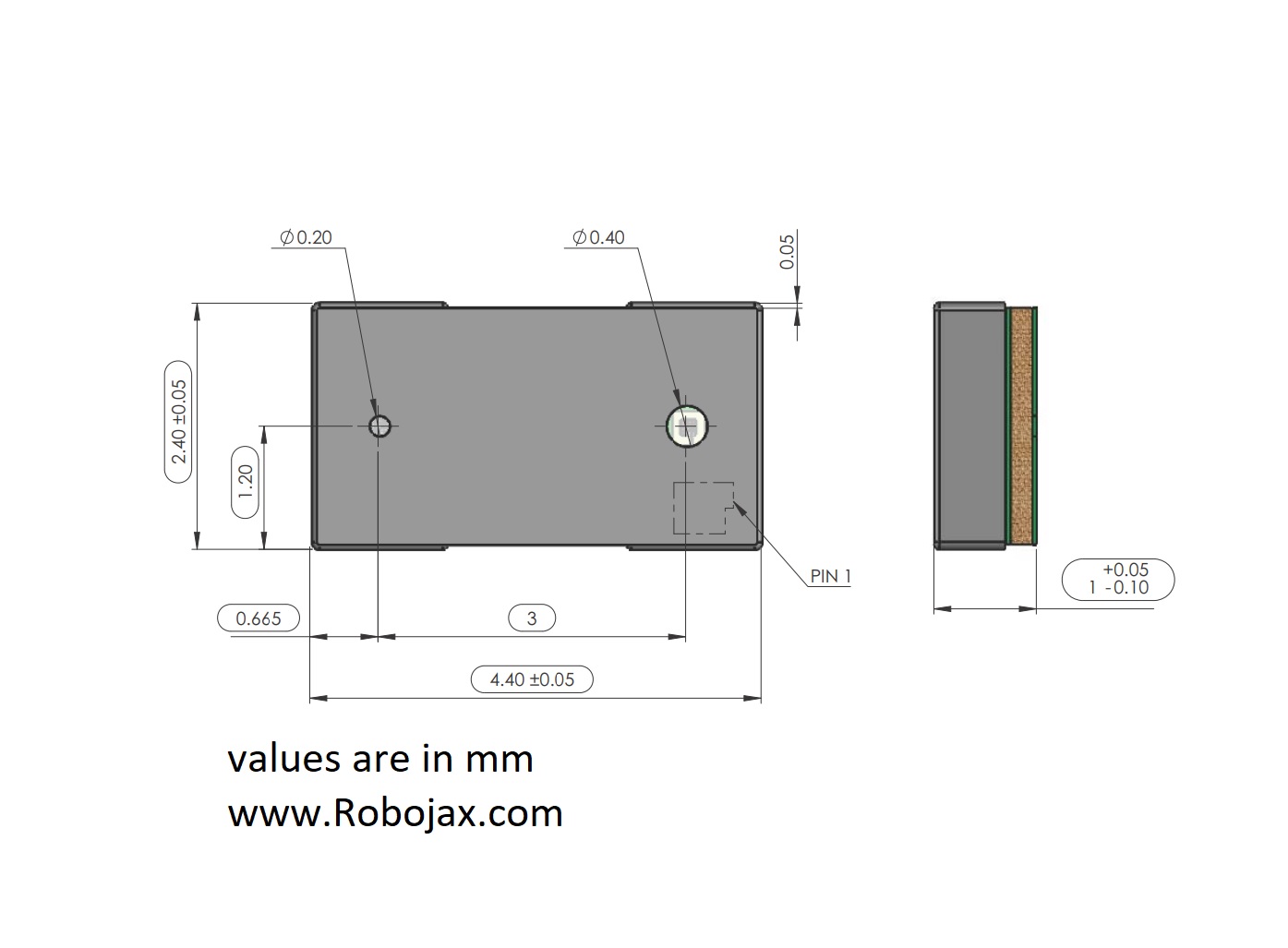
VL53L0X Dimensions
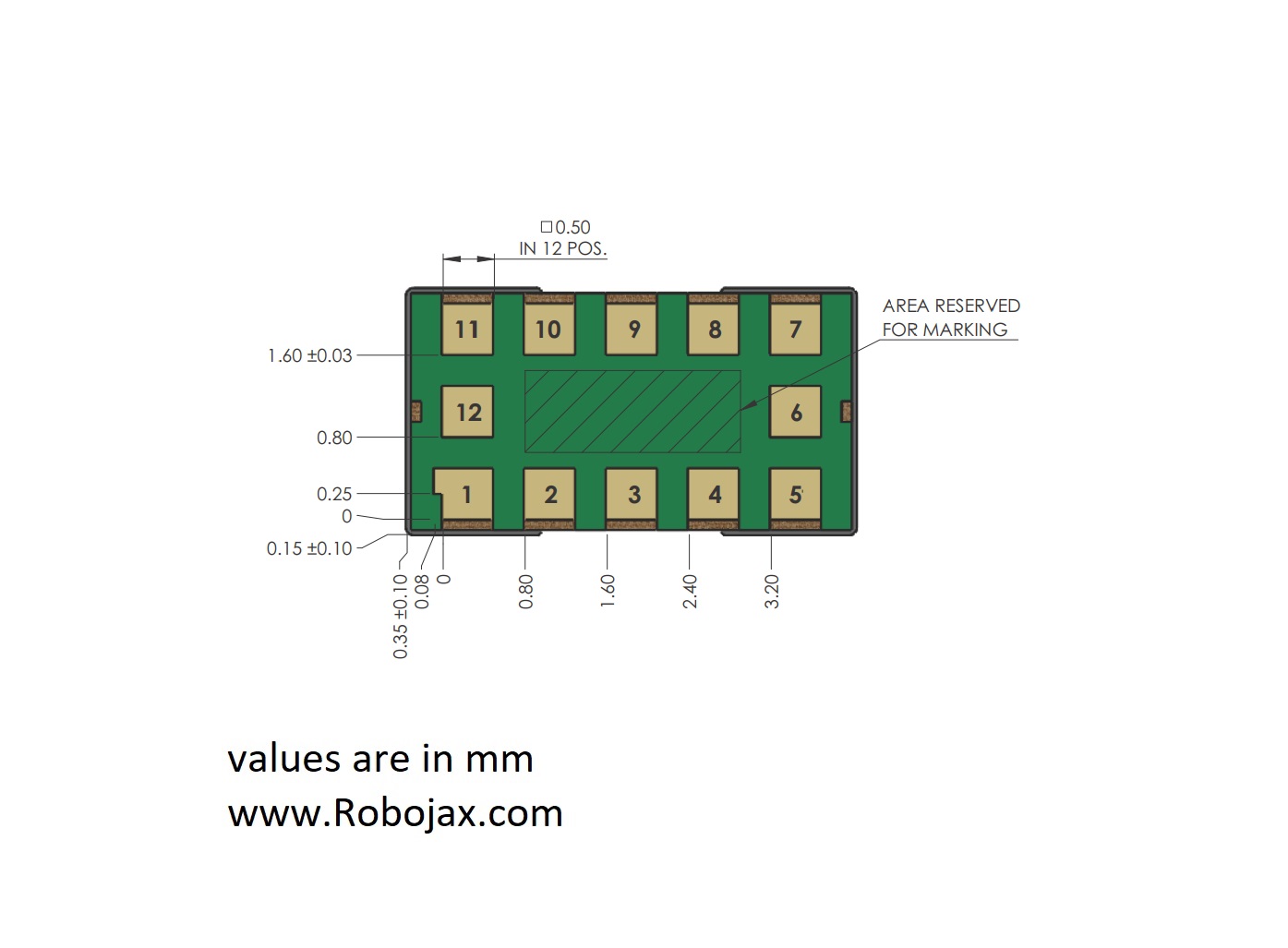
VL53L0X Dimensions 2
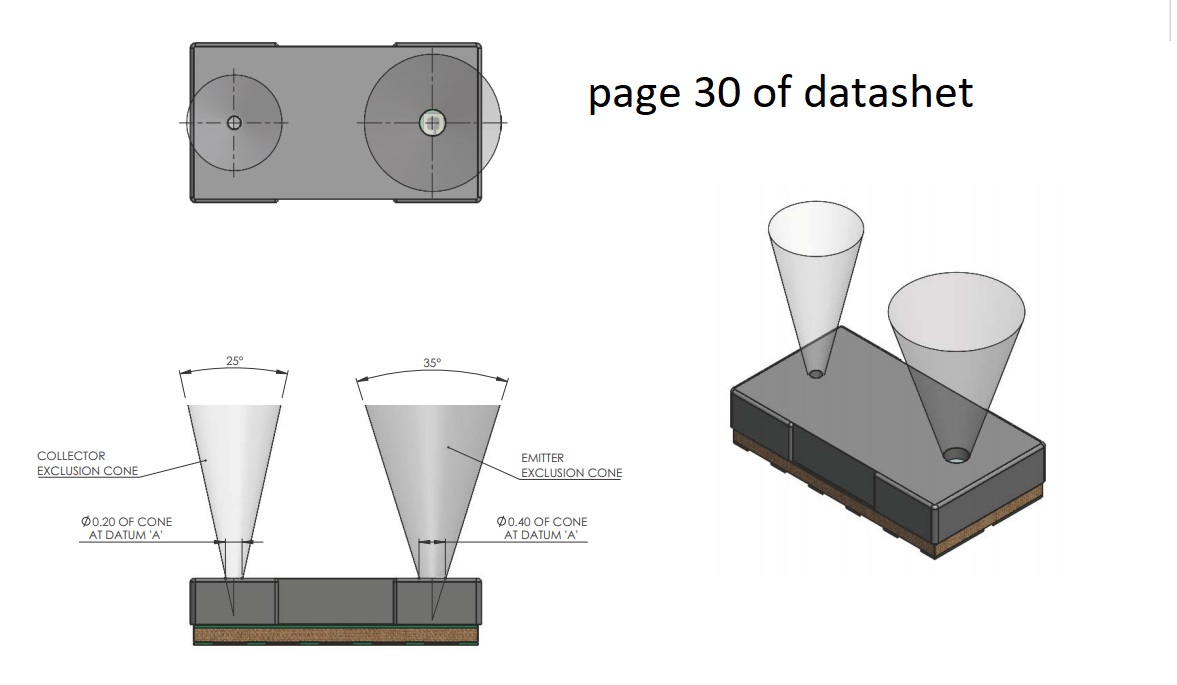
VL53L0X Emitter and Collector cone angles
- 5V 28BYJ-48 Motor Datasheet(pdf).
- Leran Arduino in 30 Minuetes (video)
- Robojax Arduino Course on Udemy
- Get Early Access to my videos via Patreon
/*
* Original Library soruce: https://github.com/adafruit/Adafruit_VL53L0X
*
* Using 2 VL53L0X Laser Distance Sensors
*
*
* Watch video instructions for this code: https://youtu.be/0glBk917HPg
*
Updated by Ahmad Shamshiri in April 2020
* in Ajax, Ontario, Canada. www.robojax.com
*
Need wiring diagram from this code: https://youtu.be/0glBk917HPg
Purchase My Arduino course on Udemy.com http://robojax.com/L/?id=62
*
* Get this code and other Arduino codes from Robojax.com
Learn Arduino step by step in structured course with all material, wiring diagram and library
all in once place. Purchase My course on Udemy.com http://robojax.com/L/?id=62
If you found this tutorial helpful, please support me so I can continue creating
content like this. You can support me on Patreon http://robojax.com/L/?id=63
or make donation using PayPal http://robojax.com/L/?id=64
* * This code is "AS IS" without warranty or liability. Free to be used as long as you keep this note intact.*
* This code has been download from Robojax.com
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <https://www.gnu.org/licenses/>.
*/
#include "Adafruit_VL53L0X.h"
// address we will assign if dual sensor is present
#define LOX1_ADDRESS 0x30
#define LOX2_ADDRESS 0x31
int sensor1,sensor2;
// set the pins to shutdown
#define SHT_LOX1 7
#define SHT_LOX2 6
// objects for the vl53l0x
Adafruit_VL53L0X lox1 = Adafruit_VL53L0X();
Adafruit_VL53L0X lox2 = Adafruit_VL53L0X();
// this holds the measurement
VL53L0X_RangingMeasurementData_t measure1;
VL53L0X_RangingMeasurementData_t measure2;
/*
Reset all sensors by setting all of their XSHUT pins low for delay(10), then set all XSHUT high to bring out of reset
Keep sensor #1 awake by keeping XSHUT pin high
Put all other sensors into shutdown by pulling XSHUT pins low
Initialize sensor #1 with lox.begin(new_i2c_address) Pick any number but 0x29 and it must be under 0x7F. Going with 0x30 to 0x3F is probably OK.
Keep sensor #1 awake, and now bring sensor #2 out of reset by setting its XSHUT pin high.
Initialize sensor #2 with lox.begin(new_i2c_address) Pick any number but 0x29 and whatever you set the first sensor to
*/
void setID() {
// all reset
digitalWrite(SHT_LOX1, LOW);
digitalWrite(SHT_LOX2, LOW);
delay(10);
// all unreset
digitalWrite(SHT_LOX1, HIGH);
digitalWrite(SHT_LOX2, HIGH);
delay(10);
// activating LOX1 and reseting LOX2
digitalWrite(SHT_LOX1, HIGH);
digitalWrite(SHT_LOX2, LOW);
// initing LOX1
if(!lox1.begin(LOX1_ADDRESS)) {
Serial.println(F("Failed to boot first VL53L0X"));
while(1);
}
delay(10);
// activating LOX2
digitalWrite(SHT_LOX2, HIGH);
delay(10);
//initing LOX2
if(!lox2.begin(LOX2_ADDRESS)) {
Serial.println(F("Failed to boot second VL53L0X"));
while(1);
}
}
void read_dual_sensors() {
lox1.rangingTest(&measure1, false); // pass in 'true' to get debug data printout!
lox2.rangingTest(&measure2, false); // pass in 'true' to get debug data printout!
// print sensor one reading
Serial.print("1: ");
if(measure1.RangeStatus != 4) { // if not out of range
sensor1 = measure1.RangeMilliMeter;
Serial.print(sensor1);
Serial.print("mm");
} else {
Serial.print("Out of range");
}
Serial.print(" ");
// print sensor two reading
Serial.print("2: ");
if(measure2.RangeStatus != 4) {
sensor2 = measure2.RangeMilliMeter;
Serial.print(sensor2);
Serial.print("mm");
} else {
Serial.print("Out of range");
}
Serial.println();
}
void setup() {
Serial.begin(115200);
// wait until serial port opens for native USB devices
while (! Serial) { delay(1); }
pinMode(SHT_LOX1, OUTPUT);
pinMode(SHT_LOX2, OUTPUT);
Serial.println("Shutdown pins inited...");
digitalWrite(SHT_LOX1, LOW);
digitalWrite(SHT_LOX2, LOW);
Serial.println("Both in reset mode...(pins are low)");
Serial.println("Starting...");
setID();
}
void loop() {
read_dual_sensors();
delay(100);
}