
Measure distance with Laser T-of-Flight VL53L0X with Arduino
Using VL53L0X Laser Distance meter in Arduino (6 pin in a row)
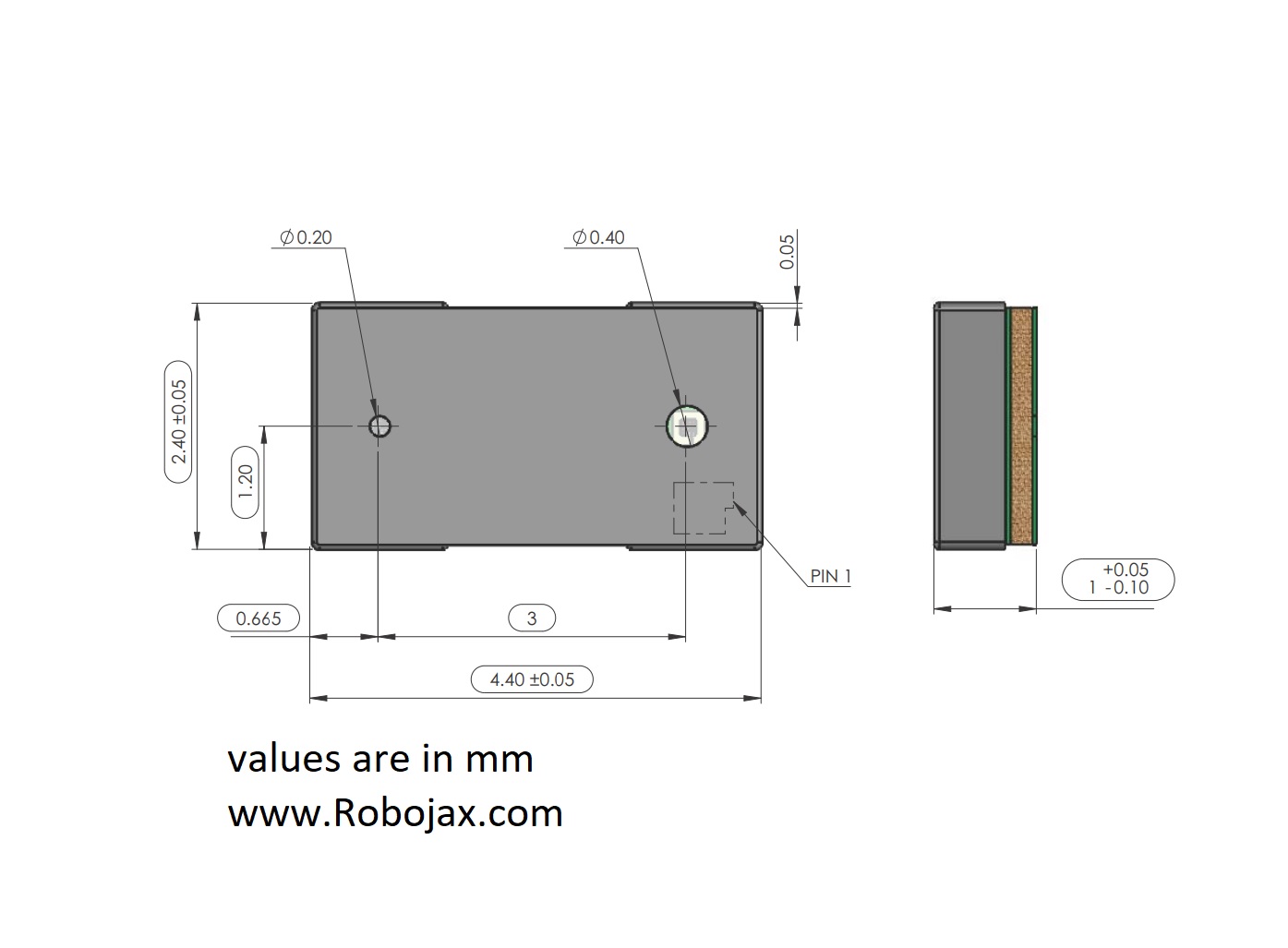
This video shows you how to use the VL53L0X module to measure distance. Library from PololuVL53L0X Dimensions
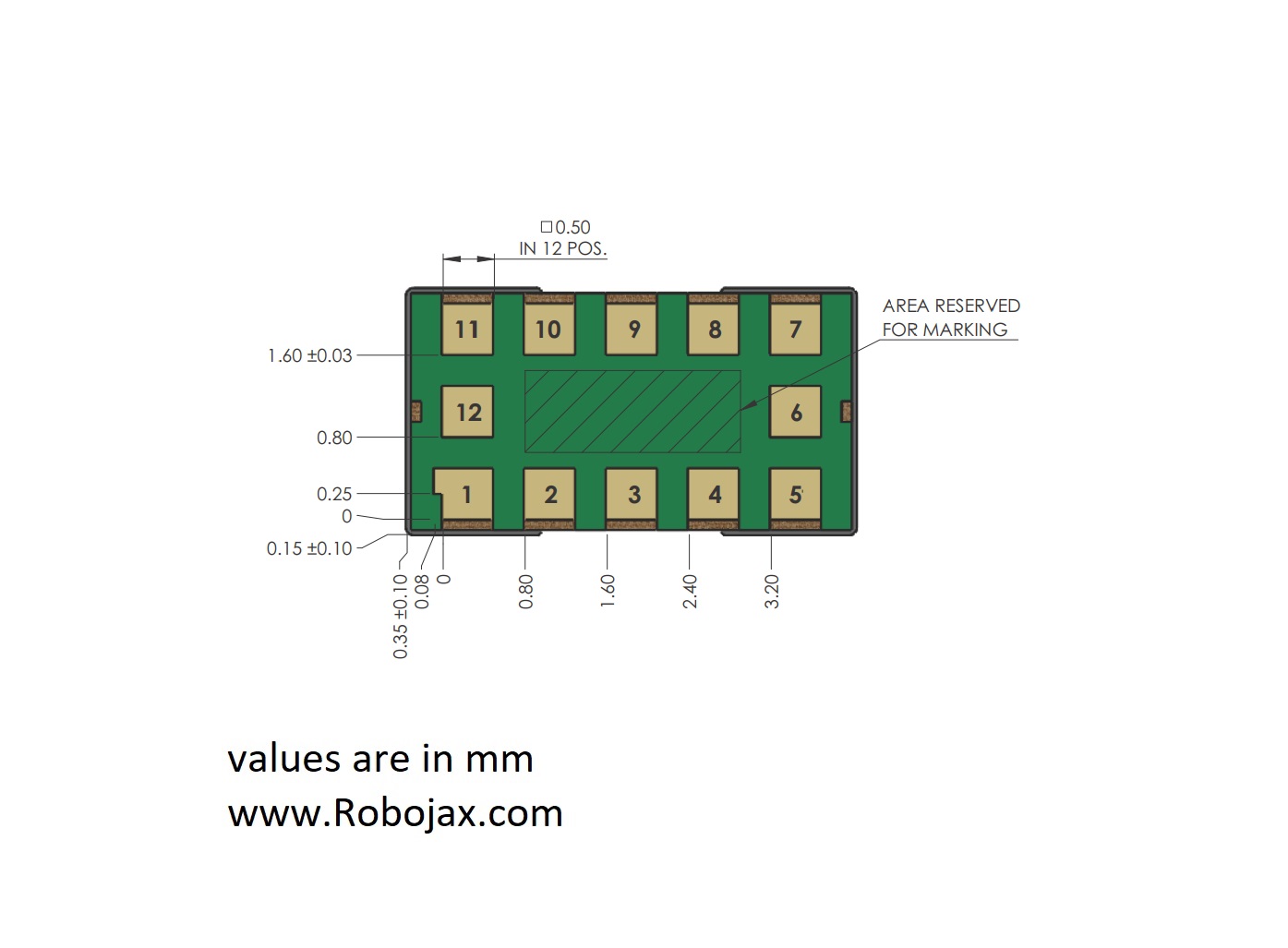
VL53L0X Dimensions 2
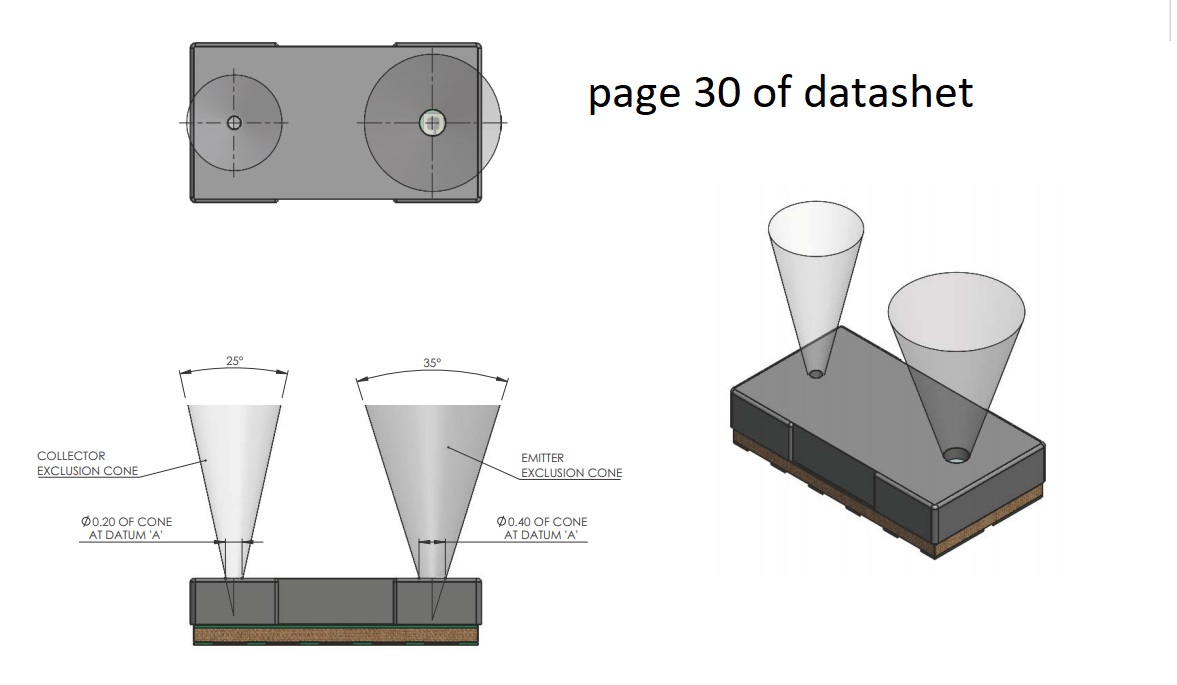
VL53L0X Emitter and Collector cone angles
Downloads
Source code for VL523L0X Distance measurement module for Arduino
/* This example shows how to use continuous mode to take
range measurements with the VL53L0X. It is based on
vl53l0x_ContinuousRanging_Example.c from the VL53L0X API.
The range readings are in units of mm.
Original source: https://github.com/pololu/vl53l0x-arduino
Modified by Ahmad Shamshiri for RoboJax.com
Date mortified: Sep 26, 2017
*/
#include <Wire.h>
#include <VL53L0X.h>
VL53L0X sensor;
void setup()
{
Serial.begin(9600);
Wire.begin();
sensor.init();
sensor.setTimeout(500);
// Start continuous back-to-back mode (take readings as
// fast as possible). To use continuous timed mode
// instead, provide a desired inter-measurement period in
// ms (e.g. sensor.startContinuous(100)).
sensor.startContinuous();
}
void loop()
{
int distance =sensor.readRangeContinuousMillimeters();
distance = distance -55;// -55 is to compensate for error. Change or set it to zero to make it work for your sensor
Serial.print("Distance: ");
Serial.print(distance);
Serial.print("mm");
if (sensor.timeoutOccurred()) { Serial.print(" TIMEOUT"); }
Serial.println();
}
Source code for VL53L0X Distance measurement using two sensor module for Arduino
This code is to measure distance using two VL53L0X modules. Each module's distance value is displayed separately.
/* This example shows how to use continuous mode to take
range measurements with two VL53L0X. It is based on
vl53l0x_ContinuousRanging_Example.c from the VL53L0X API.
The range readings are in units of mm.
Original source: https://github.com/pololu/vl53l0x-arduino
Modified by Ahmad Shamshiri for RoboJax.com
Date mortified: June 06, 2018
Deniss from YouTube requested this code on June 06, 2018
*/
#include <Wire.h>
#include <VL53L0X.h>
VL53L0X sensor1;// define object for sensor 1
VL53L0X sensor2;// define object for sensor 2
void setup()
{
Serial.begin(9600);
Wire.begin();
sensor1.init();// initialize sensor 1
sensor1.setTimeout(500);// set time out for sensor 1
sensor2.init();// initialize sensor 2
sensor2.setTimeout(500);// set time out for sensor 2
// Start continuous back-to-back mode (take readings as
// fast as possible). To use continuous timed mode
// instead, provide a desired inter-measurement period in
// ms (e.g. sensor.startContinuous(100)).
sensor1.startContinuous();// measure continuously for sensor 1
sensor2.startContinuous();// measure continuously for sensor 2
}
void loop()
{
int distance1 =sensor1.readRangeContinuousMillimeters();// get distance for sensor 1
int distance2 =sensor2.readRangeContinuousMillimeters();// get distance for sensor 2
distance1 = distance1 -55;// -55 is to compensate for error. Change or set it to zero to make it work for your sensor
distance2 = distance2 -34;// -35 is to compensate for error. Change or set it to zero to make it work for your sensor
Serial.print("Distance 1: ");
Serial.print(distance1);// print distance from sensor 1
Serial.print("mm Distance 2: ");
Serial.print(distance2);// print distance from sensor 2
Serial.print("mm");
if (sensor1.timeoutOccurred()) { Serial.print(" TIMEOUT 1"); }
if (sensor2.timeoutOccurred()) { Serial.print(" TIMEOUT 2"); }
Serial.println();
}