H-Brücke 1: Aufbau eines H-Brücken-Motortreibers auf einem Steckbrett mit TIP120- und TIP125-Darlington-Transistoren
Dieses Tutorial führt Sie durch den Aufbau eines H-Brücken-Motortreibers mit TIP120- und TIP125-Darlington-Transistoren auf einem Steckbrett. Dieses Setup ist ideal, um die Richtung und Geschwindigkeit eines Gleichstrommotors zu steuern, was für verschiedene Robotik- und Automatisierungsprojekte unerlässlich ist. Am Ende dieses Tutorials werden Sie in der Lage sein, einen Motor sowohl mit Uhrzeigersinn- als auch gegen den Uhrzeigersinn-Drehungen zu steuern, zusammen mit einer Geschwindigkeitsmodulation.
In diesem Leitfaden werden wir ein Arduino zur Steuerung des Motors verwenden. Die H-Brücken-Konfiguration ermöglicht es, die Richtung des Motors umzukehren, indem die Eingangssignale, die an die Transistoren gesendet werden, gesteuert werden. Dies ist ein entscheidender Aspekt für viele Anwendungen, wie z. B. Roboterarme oder mobile Roboter, die eine präzise Motorsteuerung erfordern. Zur weiteren Klärung verweisen Sie bitte auf das Video (im Video bei 00:00).
Hardware erklärt
Die Hauptkomponenten dieses Projekts sind die Transistoren TIP120 und TIP125, die als Schalter zur Steuerung des Motorbetriebs verwendet werden. Der TIP120 ist ein NPN-Darlington-Transistor, und der TIP125 ist ein PNP-Darlington-Transistor. Zusammen bilden sie die H-Brücken-Konfiguration, die es uns ermöglicht, die Richtung des durch den Motor fließenden Stroms zu steuern.
In diesem Setup wird das PWM-Signal (Pulsweitenmodulation) verwendet, um die Geschwindigkeit des Motors zu steuern. Die Transistoren schalten schnell ein und aus, um eine durchschnittliche Spannung zu erzeugen, die die Motorgeschwindigkeit bestimmt. Die EN-Pins aktivieren oder deaktivieren die Transistoren und stellen sicher, dass der Motor nur bei Bedarf betrieben wird.
Datenblattdetails
| Hersteller | Texas Instruments |
|---|---|
| Teilenummer | TIP120 |
| Logik/IO-Spannung | 5-15 V |
| Versorgungsspannung | 60 V |
| Ausgangsstrom (pro Kanal) | 5 A |
| Spitzenstrom (pro Kanal) | 30 A |
| PWM-Frequenzrichtlinien | 1 kHz max |
| Eingangslogikschwellen | 2,5 V (hoch), 0,8 V (niedrig) |
| Spannungsabfall / RDS(on)/ Sättigung | 1,2 V |
| Thermische Grenzen | 175 °C |
| Paket | TO-220 |
| Hinweise / Varianten | Verfügbar als TIP125 |
- Stellen Sie eine ordnungsgemäße Wärmeableitung für Hochstromanwendungen sicher.
- Verwenden Sie PWM-Signale, um die Motordrehzahl effektiv zu steuern.
- Überprüfen Sie die Transistororientierung, um Schäden am Schaltkreis zu vermeiden.
- Achten Sie auf die Spannungswerte, um zu vermeiden, dass die Grenzen überschritten werden.
- Verwenden Sie Entkopplungskondensatoren, um die Spannungsversorgung zu stabilisieren.
Verdrahtungsanweisungen

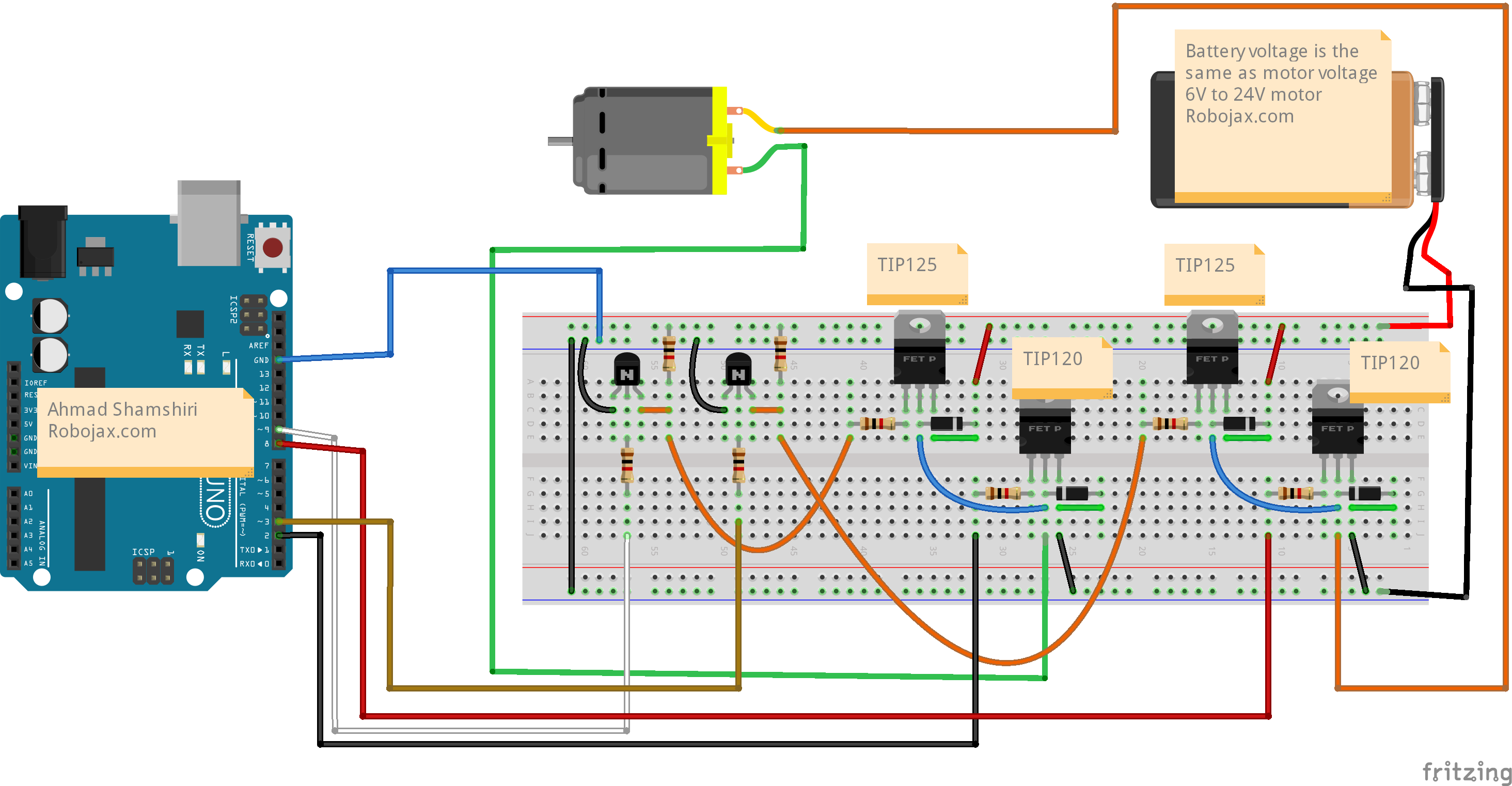
Um den H-Brücken-Motortreiber zu verdrahten, verbinden Sie zunächst den VCC-Pin des TIP120 und TIP125 mit der 5V-Versorgung Ihres Arduino. Verbinden Sie den GND-Pin mit der Erde. Die PWM-Steuerpins,PWM1undPWM2, sollten jeweils mit den digitalen Pins 9 und 3 des Arduino verbunden werden. Die Enable-Pins,EN1undEN2, wird mit den digitalen Pins 8 und 2 verbunden.
Verbinden Sie als Nächstes die Anschlüsse Ihres Motors mit den Kollektor-Pins der TIP120- und TIP125-Transistoren. Stellen Sie sicher, dass der Motor mit Ihrer Stromversorgung kompatibel ist. Wenn Sie zusätzliche Komponenten wie Dioden zum Schutz vor Rückspannung verwenden, platzieren Sie diese parallel zu den Motoranschlüssen, um Schäden durch Rück-EMF zu vermeiden. Wenn Sie verschiedene Arduino-Modelle verwenden, überprüfen Sie die Pin-Zuordnungen für PWM- und Aktivierungssignale.
Codebeispiele und Anleitung
const int PWM1= 9; //pin with ~
const int EN1= 8;
const int PWM2= 3; //pin with ~
const int EN2= 2;
Im Setup definieren wir die Steuerpins für die PWM-Signale und die Aktivierungspins. DerpinModeDie Funktion setzt diese Pins als Ausgang, um die Transistoren zu steuern, die den Motor antreiben.
void loop() {
Motor(CW, 50); //in CW at 50% speed
delay(5000);
stop(); // stops the motor
delay(2000);
}
Diese Schleifenfunktion demonstriert den Betrieb des Motors. Zuerst läuft der Motor 5 Sekunden lang mit 50% Geschwindigkeit im Uhrzeigersinn, dann stoppt er für 2 Sekunden. DerMotorDie Funktion wird mit Richtungs- und Geschwindigkeitsparametern aufgerufen, die das Verhalten des Motors basierend auf diesen Eingaben steuern.
void Motor(boolean direction, int speed=0) {
int speedPWM = map(speed, 0, 100, 0, 255);
if(direction) {
analogWrite(PWM1, speedPWM); // Set speed for CW
} else {
analogWrite(PWM2, speedPWM); // Set speed for CCW
}
}
DieMotorDie Funktion nimmt eine boolesche Richtung und eine ganze Zahl für die Geschwindigkeit. Sie ordnet den Geschwindigkeitsprozentsatz einem PWM-Wert zu und verwendetanalogWriteden entsprechenden Pin für die Motorsteuerung festzulegen. Diese Funktion ist entscheidend für die dynamische Änderung der Motorrichtung und -geschwindigkeit.
Demonstration / Was zu erwarten ist
Nach Abschluss der Verkabelung und dem Hochladen des Codes sollten Sie beobachten, dass der Motor 5 Sekunden lang mit 50 % Geschwindigkeit im Uhrzeigersinn rotiert, gefolgt von einem Stopp. Nach einer Verzögerung wird er 5 Sekunden lang mit 80 % Geschwindigkeit gegen den Uhrzeigersinn rotieren. Häufige Fehlerquellen sind falsche Verkabelung und Überschreitung der Spannungswerte, die die Transistoren oder den Motor beschädigen können.
Video-Zeitstempel
- 00:00- Einführung
- 01:30- Hardware-Übersicht
- 03:15- Verdrahtungsanweisungen
- 05:00- Code-Durchlauf
- 08:45- Demonstration
Bilder

Ressourcen & Referenzen
-
Extern
-
Extern
-
Extern
-
Extern
Dateien📁
Andere Dateien
-
H-Bridge-TIP120-TIP125 Gerber file for PCBXIncludes H-Bridge-TIP120-TIP125.zip, H-Bridge-TIP120-TIP125-BOM.xls and H-Bridge-TIP120-TIP125-coor.xls files to place order easily.
application/zip0.05 MB